
ID : 10540
机器人本体的搬运方法
搬运时的注意事项
VMB系列机器人的质量约为250kg。搬运机器人时请使用性能良好的起重机。
- 操作人员需穿戴安全鞋、手套、护目镜、安全帽等确保安全的装备。
- 确保周围有充足的作业空间。
- 使用性能良好的起重机或叉车进行机器人吊装。
- 制作专用治具等,安全进行机器人旋转。
- 提升机器人或将机器人旋转至安装方向时,事先检查可能夹住手或身体的位置,进行处理并确保无夹伤危险。
- 吊装的机器人下方请勿站人。
- 将钢缆固定至指定的悬挂螺栓(吊环螺钉)。如果吊装时未固定至悬挂螺栓,则可能导致设备破损或人员受伤。
机器人的搬运姿势
移动时调整为下述平衡姿势后进行搬运。

搬运时比较平衡的机器人姿势
VMB-2515
| 轴编号 | 角度[deg] |
|---|---|
| J1 | 0° |
| J2 | -13° |
| J3 | 170° |
| J4 | 0° |
| J5 | 0° |
| J6 | 0° |
VMB-2518
| 轴编号 | 角度[deg] |
|---|---|
| J1 | 0° |
| J2 | -10° |
| J3 | 170° |
| J4 | 0° |
| J5 | 0° |
| J6 | 0° |
使用叉车搬运
使用叉车搬运时,请使用以下叉车套件
除搬运机器人时,其他时候请拆除叉车用附加装置。
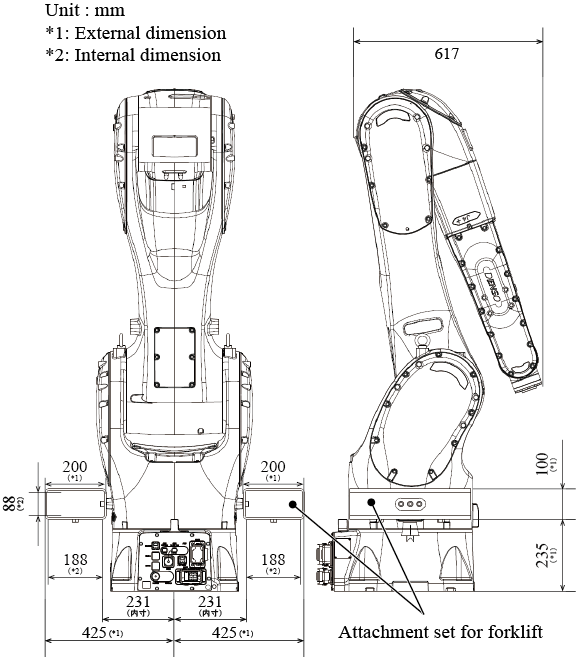
*外径尺寸:附加装置的外表面尺寸、内径尺寸:附加装置的内表面尺寸
*附加装置 (钢管)的厚度:6mm
叉车用附加装置套件
| 选件名 | 个数 |
|---|---|
| 叉车用附加装置 | 2个 |
| 内六角螺栓M12×30 强度区分12.9 | 6个 |
| 紧固扭矩 | 42±8Nm |
|---|
连接外装电池单元的机器人的注意事项
连接外装电池单元的机器人,已拆下本体内部的编码器备份电池。移动或搬运、拆卸机器人等需要从机器人拆下外装电池箱时,请再次安装机器人内的编码器备份电池。如果在机器人内未安装编码器备份电池的状态下直接拆下外装电池单元,拆下的导致编码器数据丢失。拆下外装电池单元前,请确认机器人本体内已安装编码器备份电池。
ID : 10540