
ID : 10541
机器人本体的固定方法
在此对以下项目进行说明。
固定方法
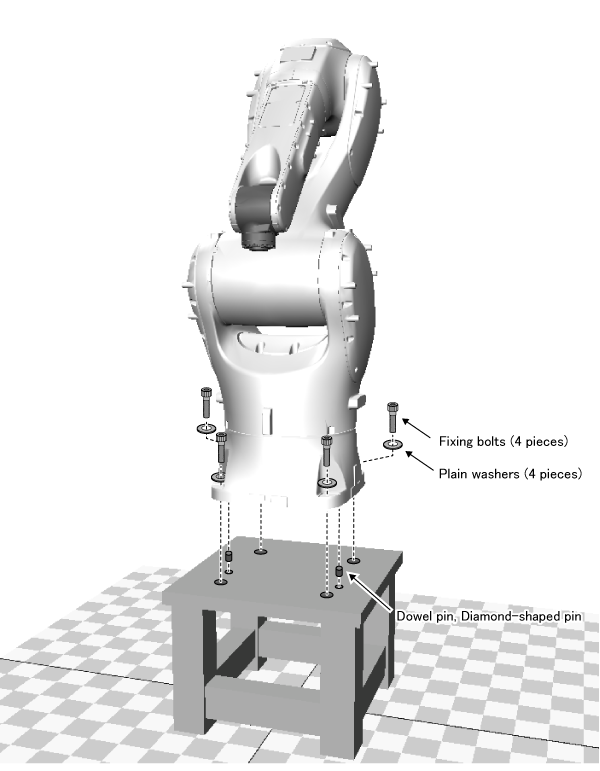
由于没有设想将机器人直接固定在地面,因此需要在机器人安装面和混凝土面之间设置架台或机器人固定用板。
固定机器人时,如下图所示,使用固定螺栓、定位销、菱形销钉。因此,架台需要设固定螺栓用螺纹和定位销孔、菱形销钉用孔。
固定时请务必使用定位销和菱形销钉或基准面进行定位。维护作业时等情况下,拆错位机器人本体时,可将位置偏移限定在最小范围内。
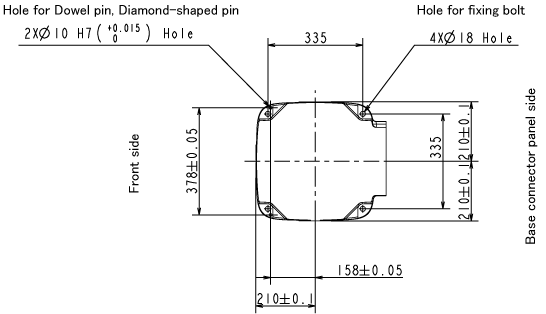
攻丝和孔的位置
俯视机器人底座部分时的各孔位置如下图所示。
请参考下图在架台上准备固定螺栓用螺纹孔、定位销、菱形销钉用孔。
螺纹孔深度请确保在30mm以上。
固定螺栓和定位销、菱形销钉
固定螺栓由客户另行准备。推荐以下内容。
- 固定螺栓
- 规格 : M16×65(强度区分12.9)
- 紧固力矩 : 317 ±63Nm
- 平垫圈
- 规格 : JIS B 1256(大垫圈)
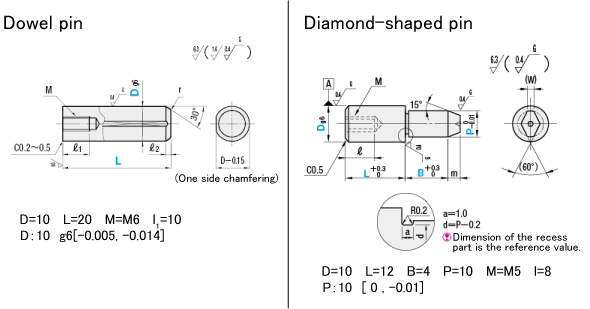
定位销钉和菱形销钉与机器人同箱包装。各销钉的尺寸如下图所示。
在架台上留出销孔(φ10H7深度10㎜)。
使用菱形销钉时,请注意菱形销钉的朝向。如下图所示,请确保菱形销钉的螺牙朝定位销钉一侧。
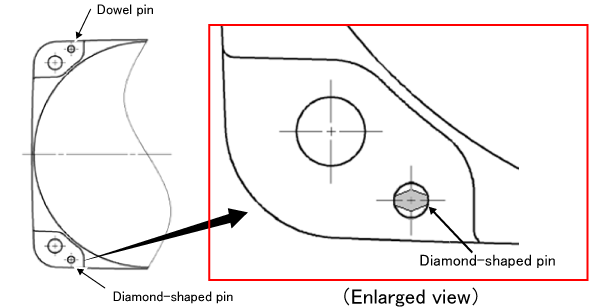
打入定位销钉固定。维护作业时等情况下,拆错位机器人本体时,可将位置偏移限定在最小范围内。
倾斜设置机器人时
倾斜设置机器人时,需要按下图确定J1的动作角度范围。 此时,请在动作范围外侧5°~20°左右设限动器。
设置面倾斜角度的J1动作角度范围
| 型式 | 倾斜角度 | 运行范围 | 型式 | 倾斜角度 | 运行范围 | |
|---|---|---|---|---|---|---|
| VMB-2515 | 0°~35° | ±170° | VMB-2518 | 0°~30° | ±170° | |
| 35° | ±63° | |||||
| 40° | ±66° | 40° | ±52° | |||
| 45° | ±55° | 45° | ±45° | |||
| 50° | ±48° | 50° | ±41° | |||
| 55° | ±44° | 55° | ±37° | |||
| 60° | ±41° | 60° | ±35° | |||
| 65° | ±38° | 65° | ±33° | |||
| 70° | ±37° | 70° | ±31° | |||
| 75° | ±35° | 75° | ±30° | |||
| 80° | 80° | |||||
| 85° | ±34° | 85° | ±29° | |||
| 90° | 90° | |||||
| 95° | 95° | |||||
| 100° | ±35° | 100° | ±30° | |||
| 105° | 105° | |||||
| 110° | ±37° | 110° | ±31° | |||
| 115° | ±38° | 115° | ±33° | |||
| 120° | ±41° | 120° | ±35° | |||
| 125° | ±44° | 125° | ±37° | |||
| 130° | ±48° | 130° | ±41° | |||
135° |
±55° | 135° |
±45° | |||
| 140° | ±66° | 140° | ±52° | |||
| 145°~180° | ±170° | 145° | ±63° | |||
| 150°~180° | ±170° | |||||
| 详细内容参照图表 | 详细内容参照图表 | |||||
ID : 10541
- 本页相关信息
- 地面安装时的固定方法