
ID : 9980
机器人安装条件的设定
机器人的安装场所不同,最佳的运行条件就会有所不同。
出厂时设定为地面设置。变更安装条件时,请变更设定。
变更机器人的安装条件时
使用智能TP变更使用条件。
操作路径:[F2 机械臂]-[F6 辅助功能]-[F1 使用条件]
1
如果按下[F1 使用条件],则显示以下[使用条件]画面。
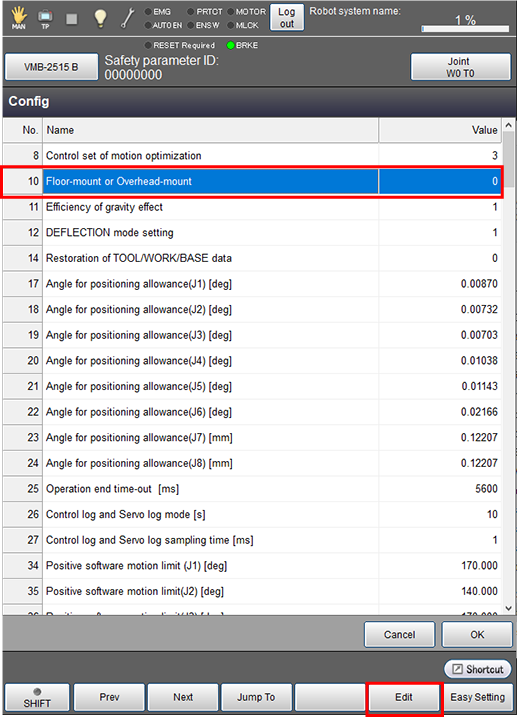
选择[地面放置、悬挂设定],按压[编辑]。
2
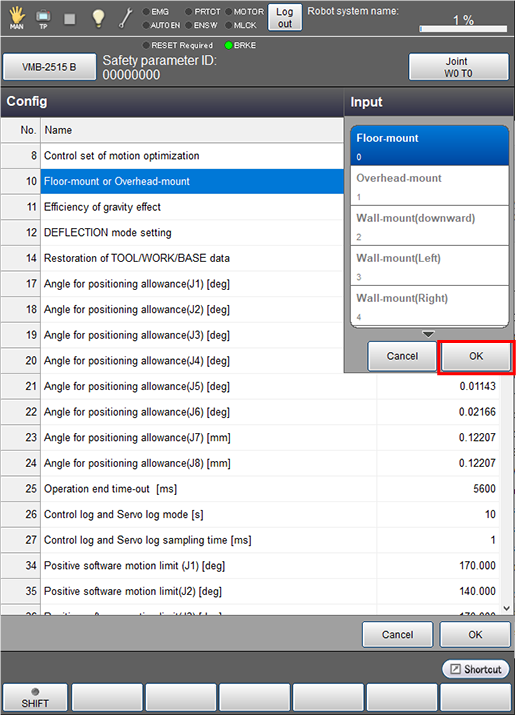
显示[输入]画面,选择安装条件,按压[OK]。
3
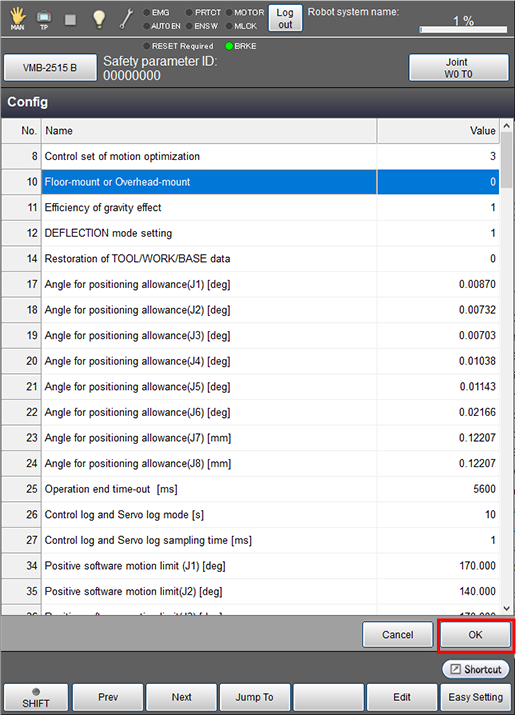
在[使用条件]画面确认值已变更,按压[OK]。
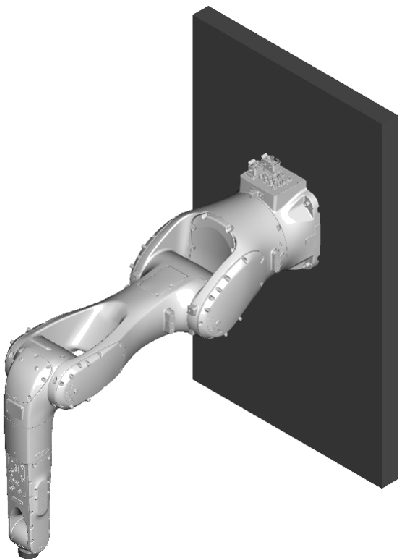
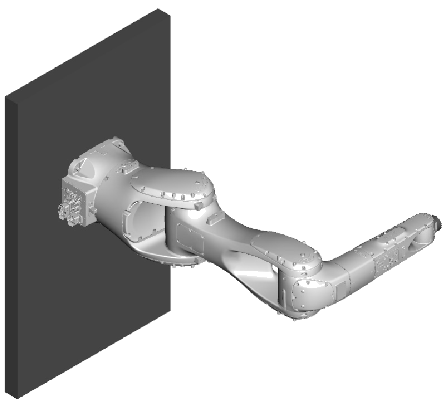
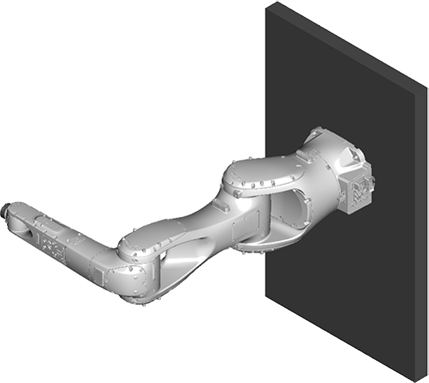
在以下状态安装时,请选择[2:壁挂下]、[3:壁挂左]、[4:壁挂右]。
| 2:壁挂下 | 以基础坐标系的Y轴为中心旋转90°的状态下安装时。
|
|---|---|
| 3:壁挂左 | 以基础坐标系的X轴为中心旋转90°的状态下安装时。
|
| 4:壁挂右 | 以基础坐标系的X轴为中心旋转-90°的状态下安装时。
|
4
根据选择的安装方向不同,设定会有所不同。
选择[5:任意角度]时
将安装方向设定成[5:任意角度]时,在[机器人倾斜角度 Ry[deg]]中
输入安装角度。
安装角度输入以基础坐标系的Y轴为中心,机器人相对于水平面倾斜的度数。
5
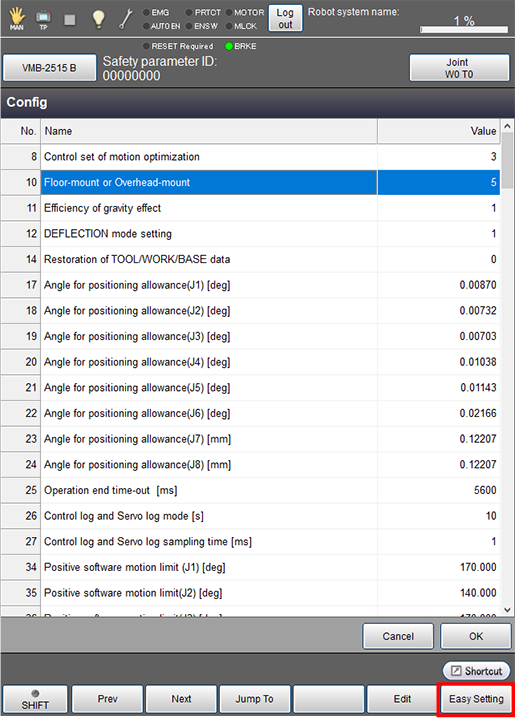
操作路径:[F2 机械臂]-[F6 辅助功能]-[F1 使用条件]
如果按压[F1 使用条件],则显示以下[使用条件]画面,按下[简单设定]。
6
按[下一步]。
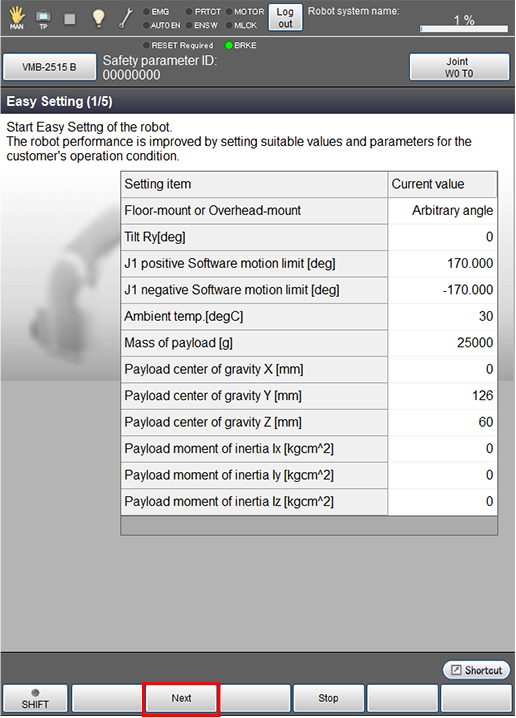
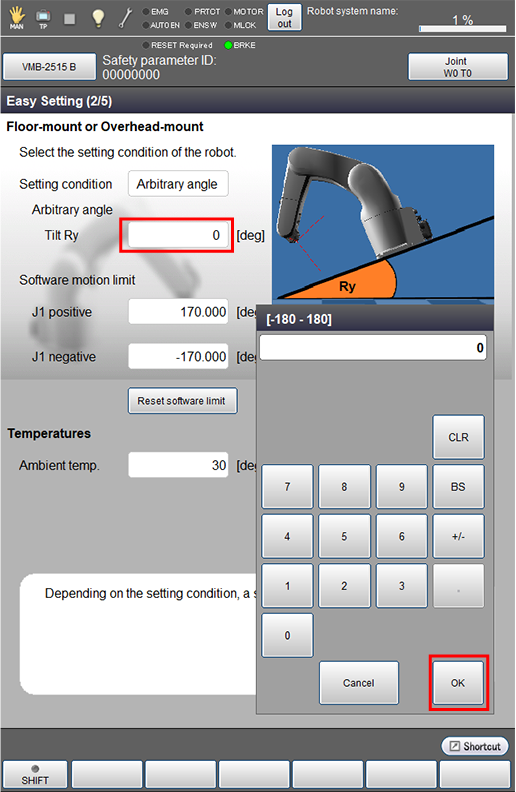
7
按压[倾斜角度Ry[deg]],输入数值,按压[OK]。
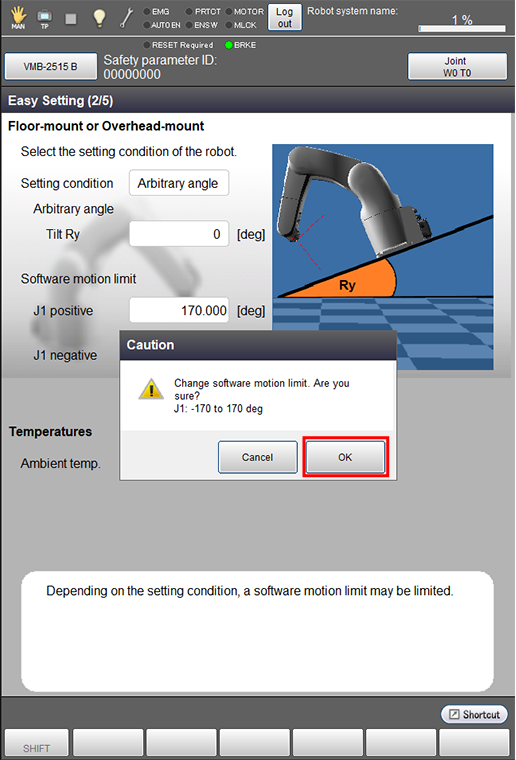
8
根据[倾斜角度Ry[deg]]不同,需要限制机器人的第1轴运行范围。限制时会显示如下信息,请按下[OK]。
机器人的安装面倾斜角度限制的第1轴运行范围请参照“倾斜安装机器人时”。
选择[5:任意角度]时的设定至此结束。
选择[2:壁挂下]、[3:壁挂左]、[4:壁挂右]的任意一个时
5
设定[2:壁挂下]、[3:壁挂左]、[4:壁挂右]的任意一个时,需要根据安装面倾斜角度(基础坐标系的Y轴为中心,机器人相对于水平面倾斜的度数)限制机器人第1轴的运行范围 。
请参照“变更第1轴的机械末端”限制第1轴的运行范围。
设定成[3:壁挂左]、[4:壁挂右]时, 由于实际的倾斜角度是以基准坐标的X轴为中心的角度,因此需要换算成以Y轴为中心的角度。 请将[3 : 壁挂左]、[4 : 壁挂右]均视为以基准坐标系的Y轴为中心倾斜90°再换算。
- [3 : 壁挂左]时,基于安装面倾斜角度的第1轴运行范围从表的运行范围减去90°。
(例 : VMB-2515时,由于倾斜角度90°的运行范围为±34°, 减去90°后,第1轴的运行范围便是-56°~-124°。) - [4 : 壁挂右]时,基于安装面倾斜角度的第1轴运行范围从表的运行范围加上90°。
(例 : VMB-2515时,由于倾斜角度90°的运行范围为±34°, 加上90°后,第1轴的运行范围便是56°~124°。)
选择[2:壁挂下]、[3:壁挂左]、[4:壁挂右]的任意一个时的设定至此结束。
ID : 9980