
ID : 9654
教导
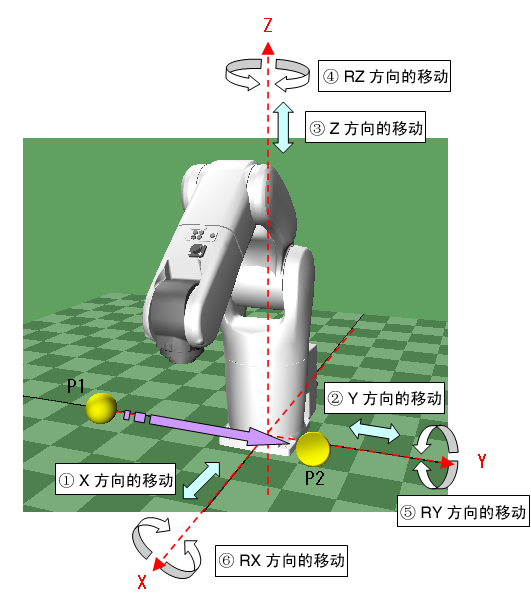
在此,就手动模式下对机器人位置变量“P1”和“P2”的值进行教导的方法进行说明。
编辑程序或教导时,请切实备份。
机器人位置(P1)的教导
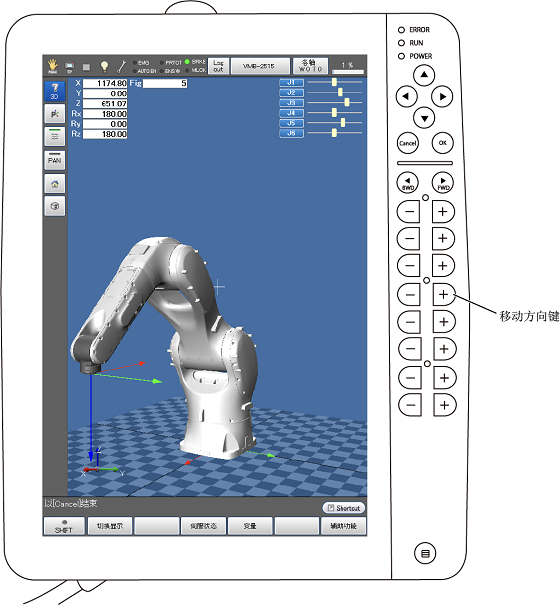
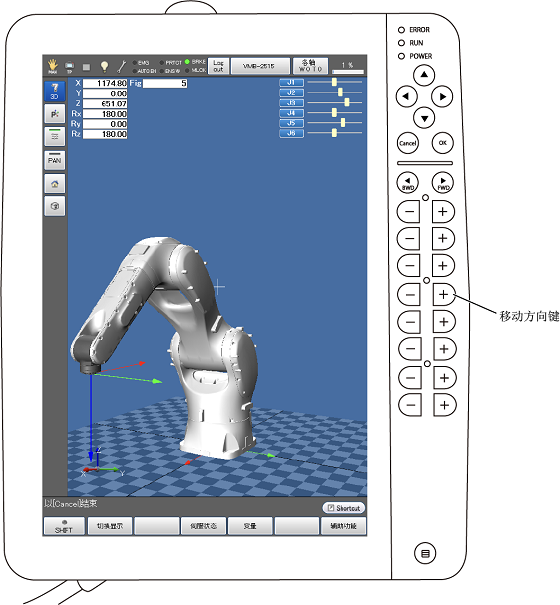
如果在智能TP的初始画面上按压[F2 机械臂],则显示机械臂的各轴信息。
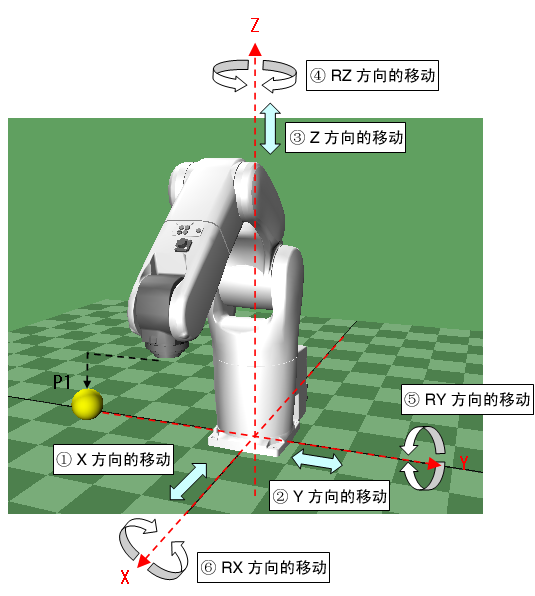
按压允许开关的同时,适当按压移动方向键,将机器人移动至要在P1中设定的位置。
将教导值保存至变量名P1
按照以下步骤将教导值保存至变量名“P1”。
1
按压[F4 变量]。
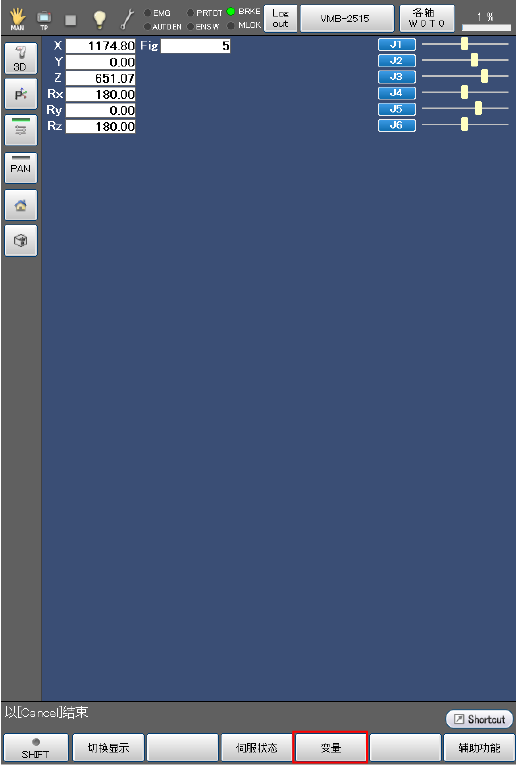
2
在变量画面中选择变量类型。
此处,将位置保存至P变量后,按压画面内的[P变量标记]。
打开变量画面时,在画面下侧显示机器人的机械臂信息,通过按压[机器人]按钮,可取消机械臂信息画面。
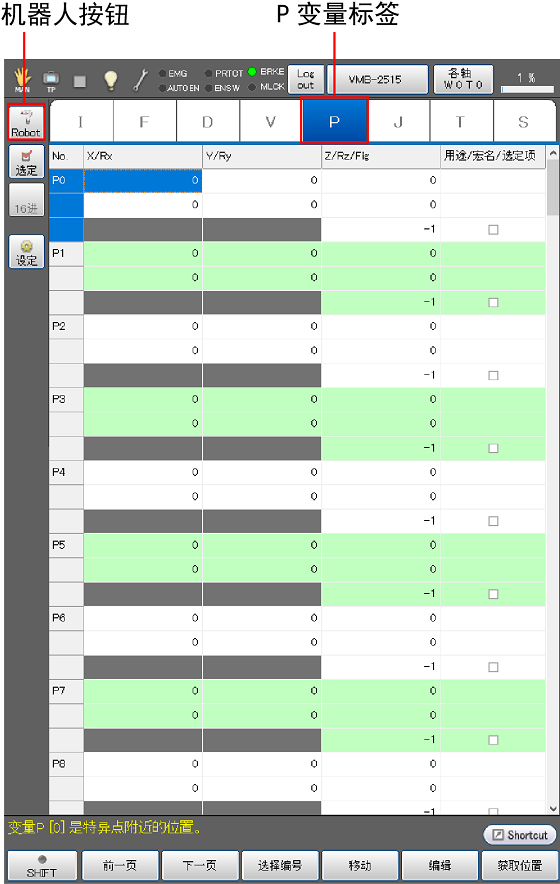
3
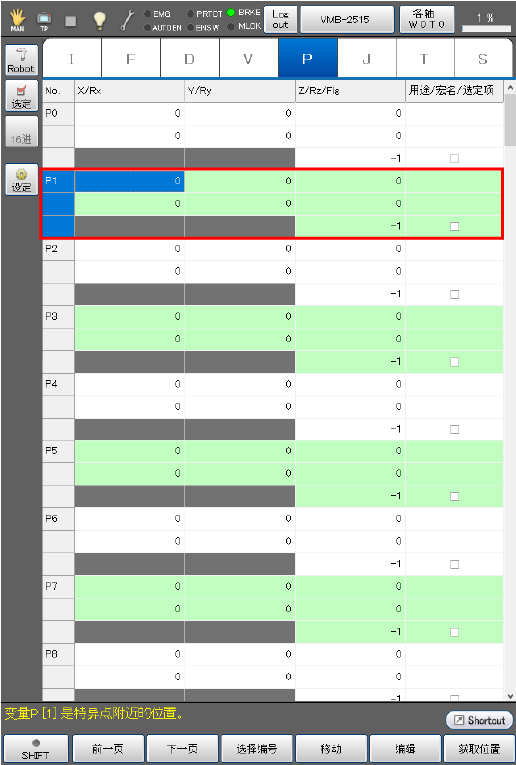
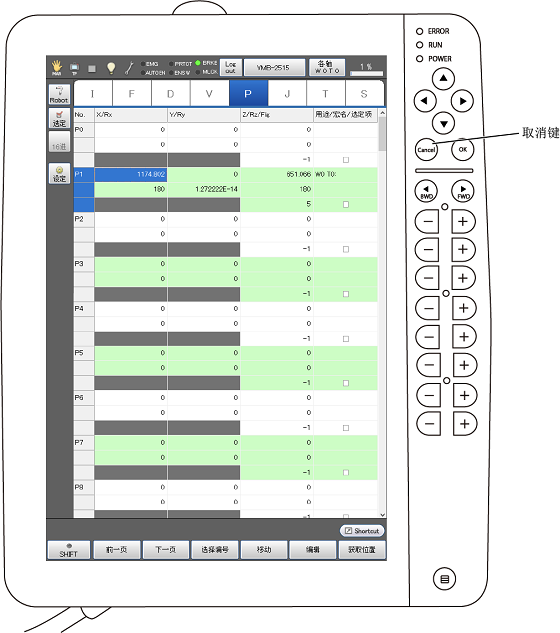
选择变量名“P1”栏。
如图所示,在P变量画面中,一个变量显示12种数据。
选择变量名“P1”时,反转12种数据中的任一数据即可选择变量名“P1”。
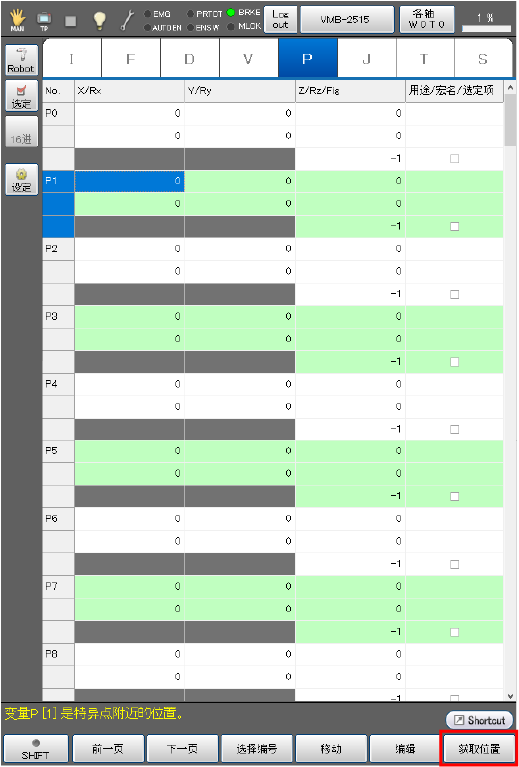
4
按压[F6 获取位置]。
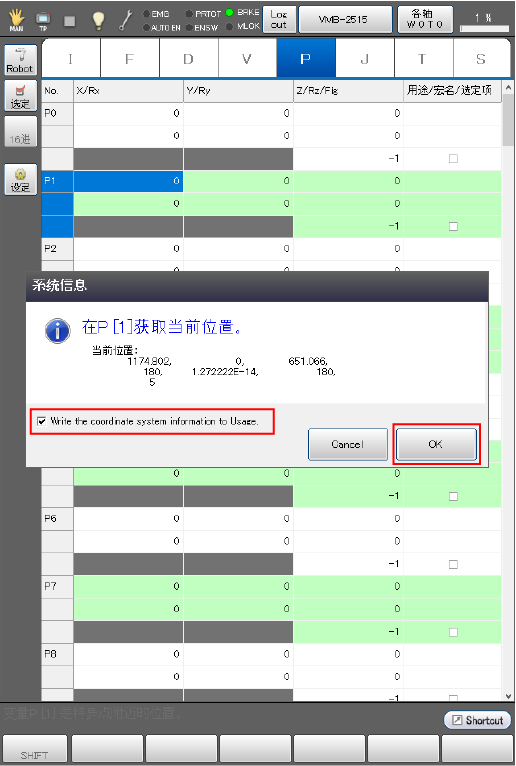
5
确认系统信息,若无问题,勾选[将坐标系信息写入用途中。]勾选,按[OK]。
- 已写入用途栏时,则覆盖坐标系信息。
- 控制器重新启动时,[将坐标系信息写入用途中。]的勾选被保持。
- 选择写入坐标系信息的用途栏,按压[F5 编辑]清除用途栏的内容。
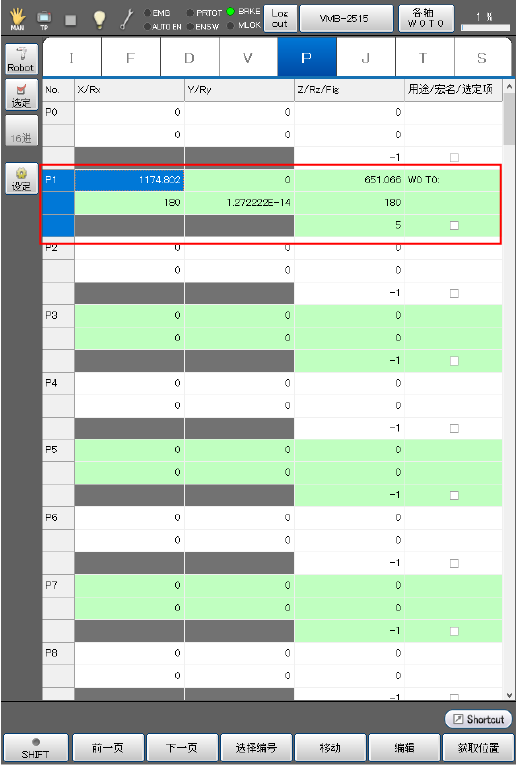
将当前位置作为变量P1的值进行输入。坐标系信息(工件编号、工具编号)被写入用途栏。
机器人位置(P2)的教导及保存至[变量名 P2]
1
按压1次[Cancel]键,返回[机械臂]画面。
2
按压允许开关的同时,适当按压移动方向键,将机器人移动至要在P2中设定的位置。
3
按照和P1相同的步骤,将机器人的当前值保存至变量名“ P2”。
至此,P1和P2的教导即完成。
关于移到教导位置的方法,请参照“变量指定移动的操作”。
ID : 9654