
ID : 9730
指定变量移动的操作(仅对应J型、T型、P型)
操作路径:[F3 变量]-[F4 移动]
此画面仅在对登录帐户授予“编程”或“维护”的用户权限时显示。
在J型、T型、P型变量中,指定变量编号,将机器人手动移至登录该指定变量编号的坐标值。
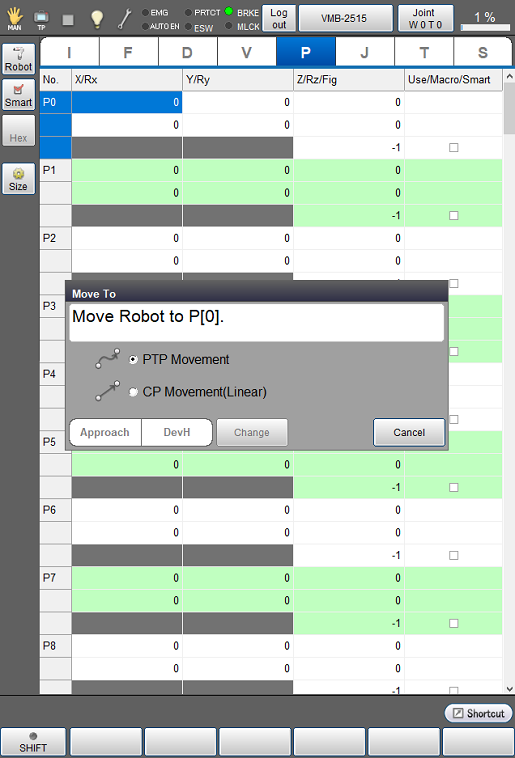
指定登录机器人移动目标坐标值的变量编号,按压[F4 移动],则显示以下[指定变量移动]视窗。
在机器人向目标坐标值移动中,可以选择用[PTP动作]移动或用[CP动作(直线)]来移动。
之后,按下允许开关并确认接通电机电源,设定机器人的运行速度,按住智能TP的[FWD]键。
在机器人到达目标坐标前松开[FWD]键,则机器人停止运行。中途停止的情况下,执行相同的操作步骤,可使机器人从停止地点向目标位置继续移动。
也可以操作接近动作或操作到偏移位置。
通过[接近]按钮指定接近距离后,机器人移至指定的接近长度位置。通过[DevH]按钮指定坐标(X、Y、Z、Rx、Ry、Rz)后,机器人从变量位置移至偏离指定坐标量的位置。
已设定接近距离或坐标(X、Y、Z、Rx、Ry、Rz)时,可通过[变更]按钮变更值。
ID : 9730