
ID : 11130
外力倣い制御パラメータの調整
スマートTPにて、外力倣い制御を監視できます。
プログラムを実行し、ねらいどおりの結果が得られない場合は、[力制御(外力倣い)]画面の結果を参考にして、パラメータを調整してください。
パラメータは、スマートTPとコマンドで調整できます。併用すると、混乱により、誤った設定を行う恐れがありますので、どちらかに統一することをお勧めします。
調整手順
1
操作経路 : 基本画面 - [F2 アーム] - [F2 力制御]
[力制御(外力倣い)]画面が表示されるので、結果を確認し、パラメータの調整項目を決めます。
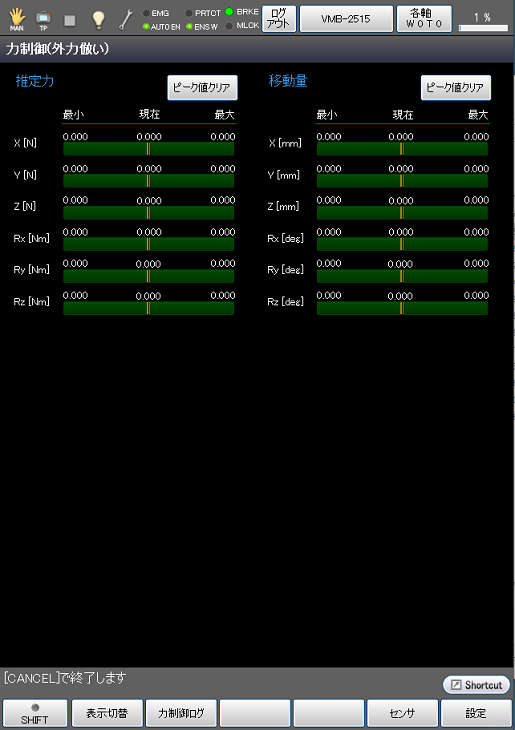
[力制御(外力倣い)]画面に表示される項目の詳細は、以下の表を参照してください。各グラフは、左右両端の位置が最大および最小を示しています。中央に表示されている数値が、現在の値です。
| 項目名 | 詳細 |
|---|---|
| 推定力 | 力制御座標系に加わる、モータの電流値から算出した、外力の推定値をグラフに表示します。 |
| 移動量 | 外力倣い制御開始時からのロボットの移動量をグラフに表示します。 |
2
[力制御(外力倣い)]画面で [F6 設定]を押し、[力制御設定]画面を開きます。
ステップ1で決めたパラメータを設定します。
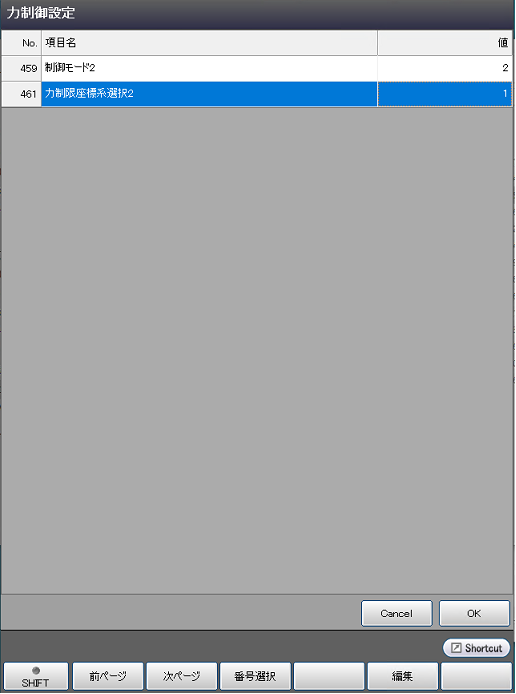
さらに詳細に調整する場合は、[力制御(外力倣い)]画面で [F12 詳細設定] を押し、[力制御詳細設定]画面にて調整を行ってください。

3
再度、プログラムを実行して、結果がねらいどおりになっているかを確認します。
結果がねらいどおりになるまで、ステップ1と2を繰り返します。
ID : 11130