
ID : 11127
パラメータ設定
外力倣い制御機能のパラメータは、スマートTPまたはWINCAPSIIIにて設定します。
設定するパラメータの詳細は、"パラメータ一覧" をご覧ください。
スマートTPの場合
スマートTPの操作による、外力倣い制御機能のパラメータ設定手順を説明します。
1
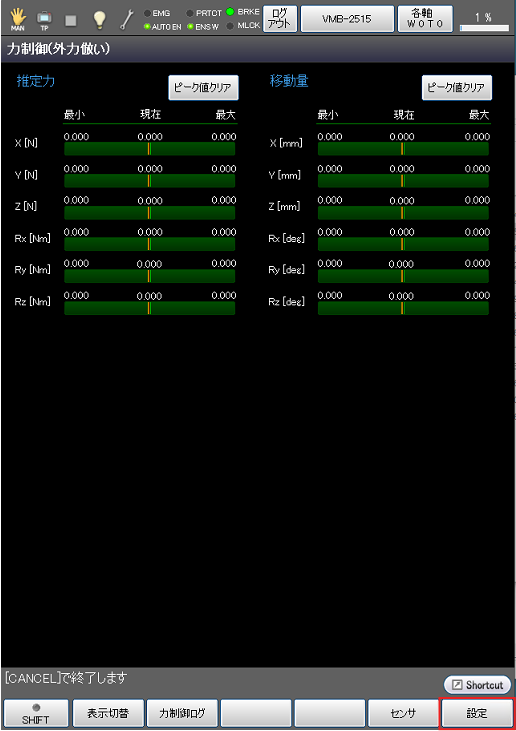
操作経路 : 基本画面 - [F2 アーム] - [F2 力制御]
[力制御(外力倣い)]画面で [F6 設定] を押します。
2
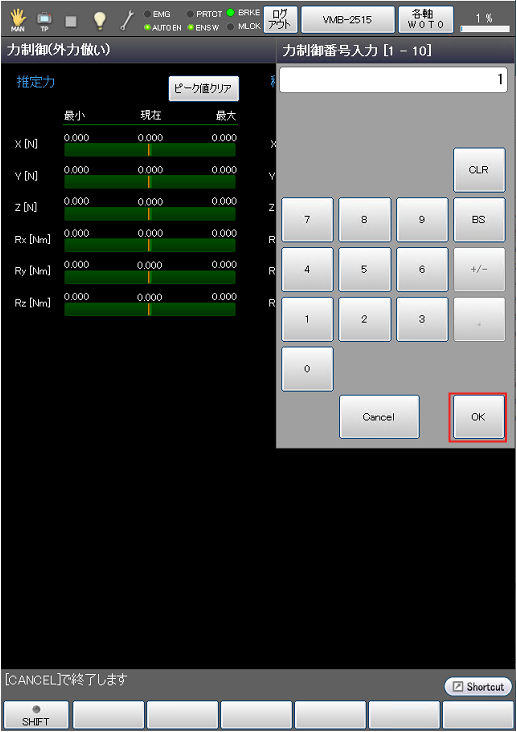
力制御番号入力用のテンキーが表示されるので、テンキーを使って、力制御番号を入力します。
力制御番号とは、パラメータ設定用のテーブル番号です。選択範囲は1~10です。
STEP3で示す [力制御設定]画面が表示されます。
- 入力した値を取消すには、[CLR]または[BS]を押してください。
- 入力した数値を確認し、よければ[OK]を押して確定してください。
- [Cancel]を押すと元の画面に戻ります。
3
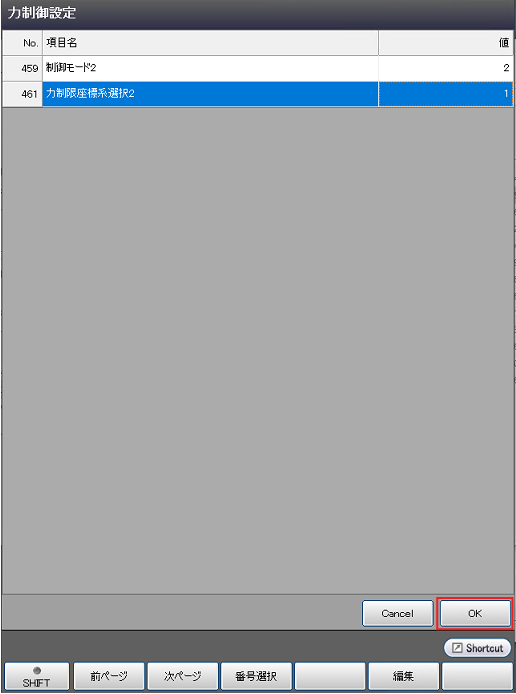
設定するパラメータを選択します。選択された行が反転表示されます。
[F5 編集]を押して、値の入力または項目を選択し、[OK]を押して確定します。
すべての項目の設定が完了後、[OK]を押します。
さらに詳細に設定したい場合は、[力制御(外力倣い)]画面で [F12 詳細設定] を押すと、[力制御詳細設定]画面が表示されますので、必要な項目を設定します。
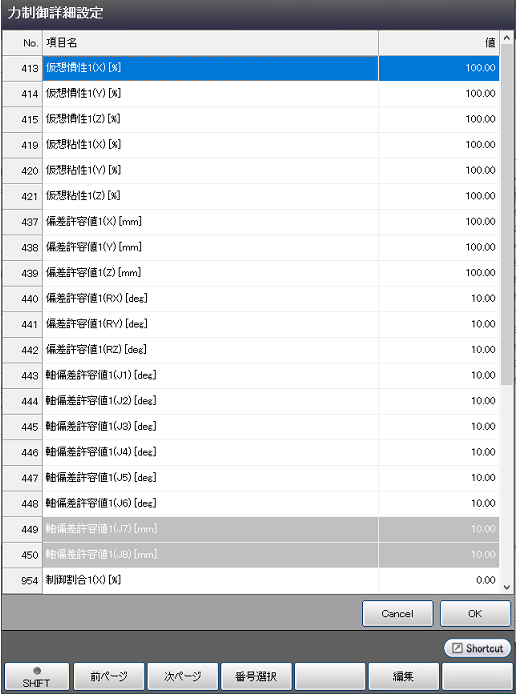
以上でパラメータの設定は完了です。
WINCAPSIIIの場合
WINCAPSIIIの操作による、外力倣い制御機能のパラメータ設定手順を説明します。
1
操作経路 : [プロジェクト] - [パラメータ] - [力制御]
[パラメータ編集]ウィンドウの左側のメニューから[力制御]を選択します。
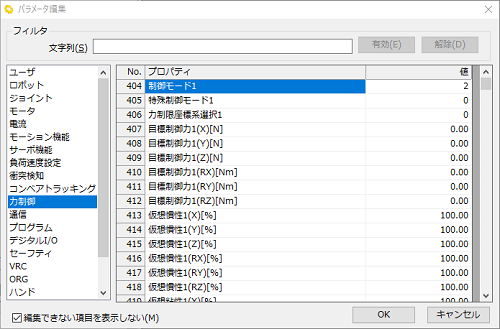
2
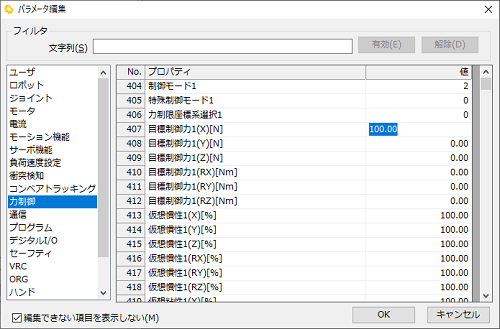
設定するパラメータの[値]を選択します。選択された行が反転表示されます。
値の入力または項目を選択し、[OK]を押して確定します。
3
パラメータ設定後、[データ送受信]にてプロジェクトをロボットコントローラに送信します。
以上でパラメータの設定は完了です。
ID : 11127