
ID : 11089
最適速度制御機能
MC9シリーズでは、キネマティクス設定から以下のロボットタイプを設定し、ダイナミクス設定を行うことで、最適速度制御機能の[モード1]、[モード3]が利用できるようになります。
| 名称 | ロボットタイプ名 | |
|---|---|---|
| H | 4軸スカラロボット | |
| 6軸 タイプA | 6軸タイプAロボット | |
| 6軸 タイプB | 6軸タイプBロボット | |
機能の設定方法、詳細については最適速度制御機能をご確認ください。
正しくダイナミクス設定を行わなかった場合、エラーが発生し、PTP動作が行えなくなることがあります。
その場合、ダイナミクス設定の見直し、もしくは最適速度制御設定を[0]に変更し動作させください。
ダイナミクス設定
1
ダイナミクス設定はWINCAPSIIIから行います。
WINCAPSIIIでダイナミクス設定を行いたいプロジェクトを開き、軸設定表を表示して下さい。
操作経路:[プロジェクトタブ] - [軸設定表] - [軸設定表タブ]
2
軸設定表タブを下までスクロールし、[ダイナミクス設定]の項目内のパラメータを設定します。
各パラメータに設定する値は以下の表を参照してください。
| パラメータ名 | 設定内容 |
|---|---|
| リンク重量[kg] | 各リンクの質量特性の値を 入力します。 パラメータを決定する際には こちらを参考に決定してください。 |
| 重心位置X[m] | |
| 重心位置Y[m] | |
| 重心位置Z[m] | |
| 重心周り慣性モーメントX[kgm^2] | |
| 重心周り慣性モーメントY[kgm^2] | |
| 重心周り慣性モーメントZ[kgm^2] | |
| メカクーロン摩擦[Nm] | 各リンクの出力側の摩擦、 粘性定数を入力します。 |
| 粘性定数[Nms] | |
| モータ側イナーシャ[kgm^2] | モータの回転子から見た イナーシャを入力します。 |
| モータ定格トルク[Nm] | モータカタログ値を入力します。 |
| モータ定格電流指令[A] | |
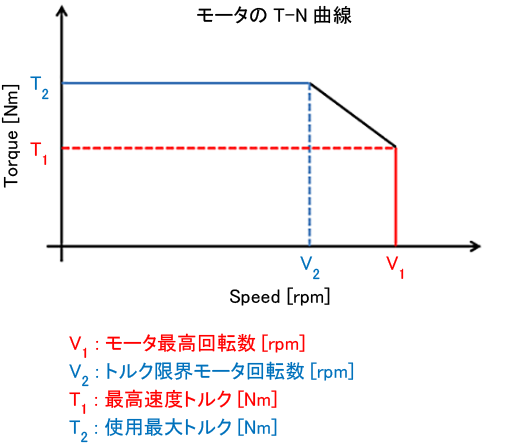
| 最高速度トルク[Nm] | モータカタログのTN特性から、 回転数が最大の際のトルク値を入力します。 パラメータを決定する際には こちらを参考に決定してください。 |
| トルク限界モータ回転数[rpm] | モータカタログのTN特性から、 最大トルク出力する最大の 回転数を入力します。 パラメータを決定する際には こちらを参考に決定してください。 |
| モータ最高回転数[rpm] | モータカタログのTN特性から、 最大の回転数を入力します。 パラメータを決定する際には こちらを参考に決定してください。 |
| 使用最大トルク[Nm] | モータカタログのTN特性から、 最大のトルクを入力します。 パラメータを決定する際には こちらを参考に決定してください。 |
参考
-
6軸ロボットの基準座標系の例
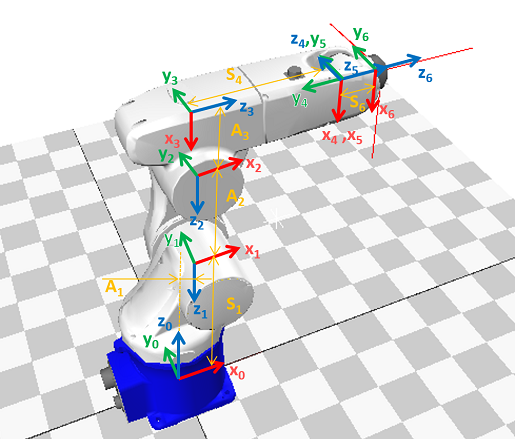
-
4軸ロボットの基準座標系の例
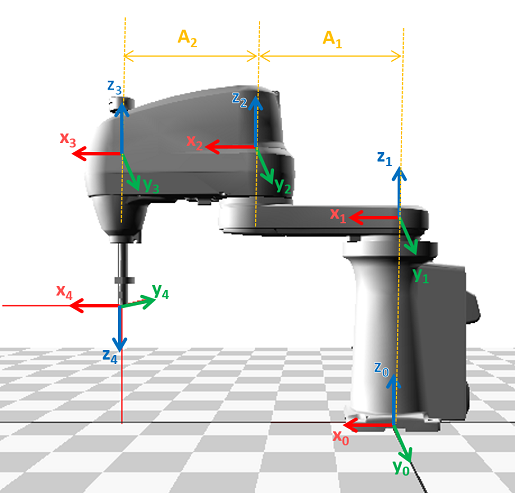
-
モータのT-N曲線と各パラメータの関係
ID : 11089