
ID : 11077
ロボット軸範囲の設定
MC9シリーズは最大8軸のサーボモータを制御できます。
接続されたモータ(軸)をロボット軸とするか、付加軸とするかを選択できます。
ロボット軸として指定できるのは第1軸から第4軸までの4軸で、軸数は任意です。
ロボット軸として指定する事でCP動作(直線、円弧動作)などのロボットの動作命令などを使うことができます。
CP動作(直線、円弧動作)などのロボットの動作命令を使用するには第1軸~第4軸を決められた構成とする必要があります。
ロボット軸以外の軸は全て付加軸としての使用となります。
ロボット軸、付加軸の操作などは、「付加軸ガイド」を参照してください。
ロボット軸
ロボット軸は軸数に応じて第1軸~第4軸を下図のような直角座標で構成することで、CP動作(直線、円弧動作)など、ロボットと同様の命令での操作が可能です。
| 1軸構成 | 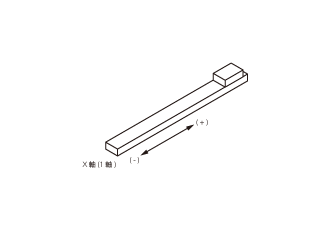 |
|---|---|
| 2軸構成 | 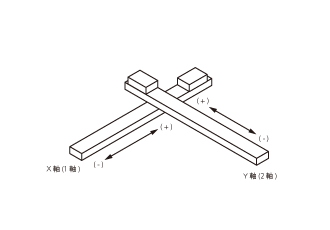 |
| 3軸構成 | 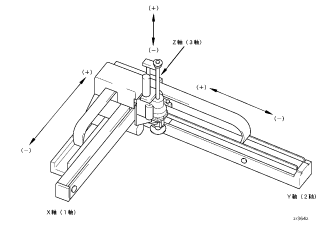 |
| 4軸構成 | 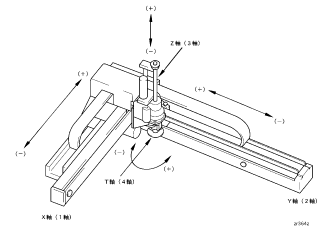 |
CP動作(直線、円弧動作)を利用して、正しく設備を動作させるには、軸構成と動作方向が上記の直角座標(右手系座標)構成と一致している必要があります。
軸の構成が上記構成と異なった状態でCP動作を行う場合、予測できない動作となり危険です。必ず、PTP動作にて動作させてください。
付加軸動作
付加軸動作は、下図のような1つの軸で構成され、PTP動作のみで動作させることが可能です。付加軸として設定した軸は、"Move命令"などのロボット動作命令は使用できません。"DriveA"、"Drive命令"を使用し、動作させます。
ID : 11077
- このページに関連する情報
- ロボット軸範囲の設定方法