
ID : 10991
エンコーダフィードバックの確認
付加軸のエンコーダから正しい応答があるか確認します。
確認手順
1
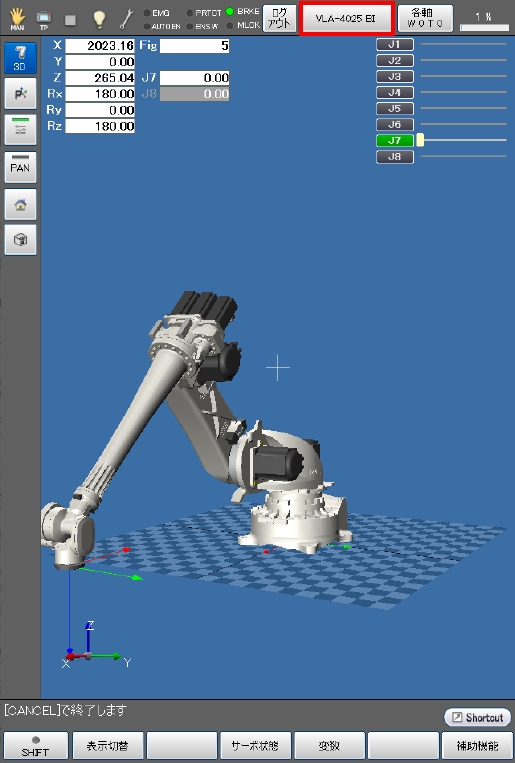
基本画面 - [F2 アーム]を押し、「ロボット現在位置情報」画面を表示します。
その後、[ロボット選択]ボタンを押すと「ロボット選択」画面が表示されます。
2
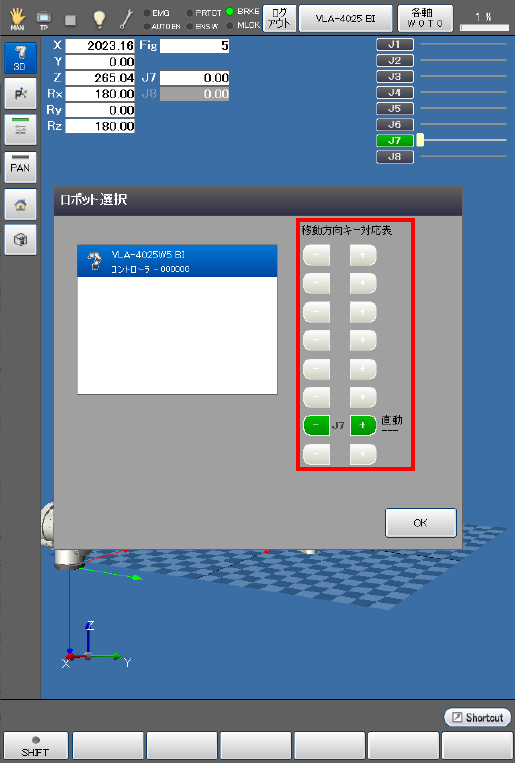
移動方向キー対応表で、対象の付加軸が表示されていることを確認します。
ここでは、7軸を有効にした場合の画面です。
3
[OK]を押し、「ロボット選択」画面を閉じます。
4
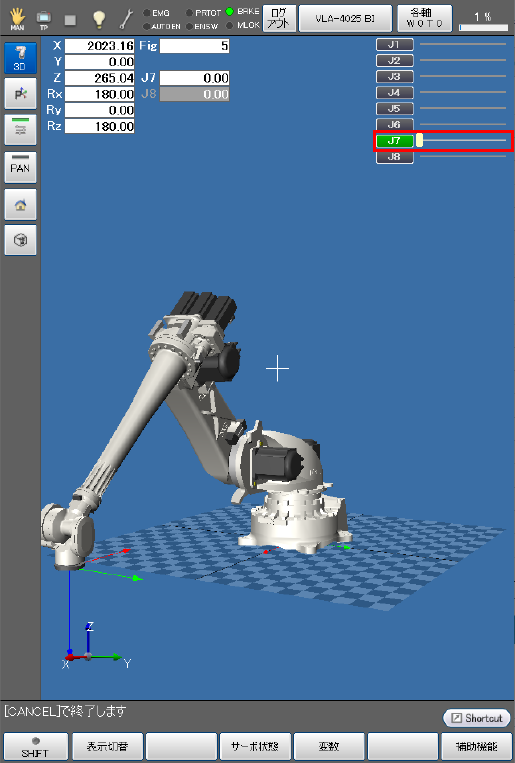
付加軸を手で押して動かし、エンコーダが追従しているか確認します。
付加軸を手で押すと、「ロボット現在位置情報」画面内、対象軸のロボット現在位置が変化します。
ここでは、7軸をのみを有効にした場合です。この場合7軸のみ現在位置の変化を確認できます。
ブレーキ解除推奨回路を利用する場合の解除方法
- 操作経路:基本画面 - [F2 アーム] - [F12 保守] - [F1 ブレーキ]
-
解除する軸を選択し、[OK]を押します。
必要な場合以外は、再度[OK]を押し、ブレーキロックします。
ブレーキ解除方法については、「配線の確認」を参照ください。
ブレーキ解除推奨回路を利用しない場合の解除方法
付加軸システムに合わせた方法で、ブレーキ解除を行ってください。
手動操作
- モータをONします。
- スマートTPの手動操作で±方向に動かし、異常なく動くか確認します。
- この時点では、手動操作ができることを確認できれば問題ないため、大きく動作させる必要はありません。
- 操作キーと、付加軸の±動作方向が意図した動作になっているかを確認しておきます。逆になっている場合は、「軌道設定」内の[極性]のパラメータを変更します。
ID : 10991