
ID : 10942
設定
スレーブターミナルの装着
EtherCATブリッジターミナルの装着方法は、「I/Oオプション」の「接続方法」を参照してください。
ロボットコントローラの機能拡張
EtherCATブリッジターミナルを使用するには、ロボットコントローラにて機能拡張が必要です。
機能拡張を行うには、スマートTPまたはWINCAPSⅢで、ライセンスキーをコントローラに登録します。詳細は、「ライセンス登録」を参照してください。
組付・ライセンス形態での購入の場合、機能拡張した状態で出荷します。
通信パラメータの設定
構成機器や環境に合わせ、通信パラメータの設定を行ってください。
| 実施項目 | 内容 |
|---|---|
| ロボットコントローラの設定 | WINCAPSⅢでデバイスの設定を行います。 デバイスの選択と、入出力サイズ、IPアドレスを設定します。 |
| マスタの設定 | ESIファイルを取得してコンフィグレータに読み込ませます。その後、PDO情報を取得することにより、入出力サイズが設定されます。 |
設定の確認と追加の設定
EtherCATブリッジターミナルのデバイス情報、およびコントローラで設定した情報を以下のスマートTP操作で確認できます。
基本画面-[F4 I/O]-[F6 補助機能]-[F4 フィールドバスパラメータ]
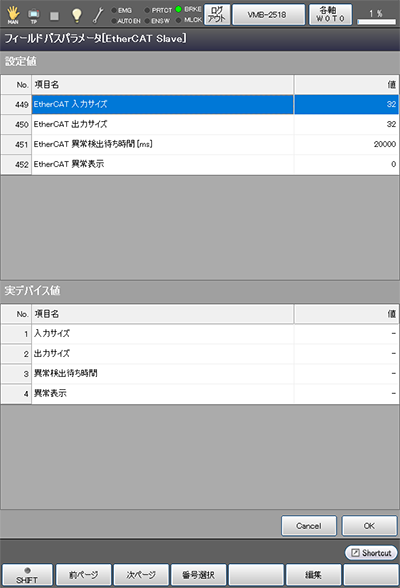
また、フィールドバスパラメータの設定もここでできます。 下記2つのパラメータはここでのみ設定が可能です。
EtherCAT 異常検出待ち時間
ロボットコントローラが起動し、EtherCAT通信の通信状態チェックが始まるまでの時間が短いと、起動直後に 8350200B「フィールドネットワーク通信準備中です」が出ることがあります。 この場合には、異常検出待ち時間(ms)を長くして調整します。
| EtherCAT 異常検出待ち時間[ms] | 設定範囲 | デフォルト |
|---|---|---|
| 値 | 0~65535 | 20000 |
EtherCAT 異常表示
ネットワーク異常を毎回検出するかどうかを設定します。
設備稼働時の安全のためデフォルトは“0”となっており、I/O入出力処理を実行する度に、エラー表示を行ないます。ネットワークが確立していない設備の調整において、擬似I/Oによるプログラム動作の確認をする場合、“1”にしてください。この設定により、初回のネットワークエラー検出後、同じエラーを検出してもエラー表示しないためプログラムの動作確認が可能になります。
| EtherCAT 異常表示 | 初回のみ | 毎回(デフォルト) |
|---|---|---|
| 値 | 1 | 0 |
ID : 10942
- このページに関連する情報
- ロボットコントローラの設定
- マスタの設定