
ID : 10831
CALSET
CALSETとは
コントローラが認識する位置情報と、ロボット本体の実際の位置の関係を較正することを、CALSETといいます。CALSETでは、各軸にあらかじめ決められた固定できる位置があり、その位置とエンコーダ値を対応させるデータ(CALSET値)を作成します。このとき軸を固定した位置をCALSET位置と呼び、CALSET位置が何度であるかを記録したデータがRANG値です。
CALSETデータは、ロボット1台ごとに異なります。
モータ交換の際は、CALSET作業が必要です。
CALSET作業には "CALSET" と "CALSETデータの復旧" があります。
モータ交換を行った際は "CALSET" を、その他の場合は "CALSETデータの復旧" を行ってください。
ロボットのCALSETデータはお客様にて管理してください。 "プロジェクトのバックアップについて" を参考にして、定期的にCALSETデータをバックアップしてください。
| 軸 | CALSET位置 | |
|---|---|---|
| J1 | 0° | 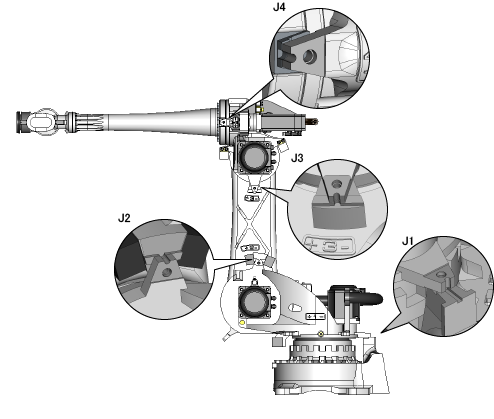 |
| J2 | 0° | |
| J3 | -90° | |
| J4 | 0° | |
| J5 | 0° | 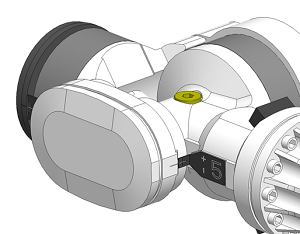 |
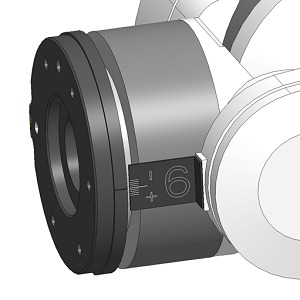
| J6 | 0° |
|
CALSETの手順
CALSETしたい軸のノッチに保護部品が取り付けられている場合は、保護部品を取り外してください。
5軸をCALSETする際は、4軸をCALSET位置に合わせる必要があります。
6軸をCALSETする際は、4軸と5軸をCALSET位置に合わせる必要があります。
1
CALSETしたい軸のブレーキを解除してCALSET位置にします。
2
スマートTPにてCALSETを行ないます。
操作方法はスマートTP操作ガイドの "CALSET操作" を参照してください。
以上でCALSETは完了です。
CALSET実施後は、取り外した保護部品を取り付けてください。
ID : 10831
- このページに関連する情報
- ツールを用いたCALSET