
ID : 10829
ロボットコントローラの設定
ロボットコントローラのパラメータ設定は、WICNAPSIIIで行います。
1
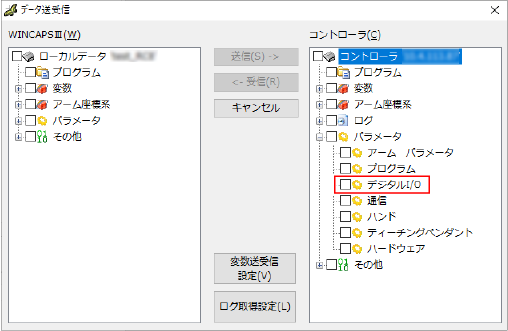
ロボットコントローラの"デジタルI/O"データをWINCAPSIIIに受信します。すでに受信済みの場合は、次のステップに進んでください。
ロボットコントローラのデータをWINCAPSIIIに受信する方法は、"データの送受信"を参照してください。"デジタルI/O"データは、[データ送受信]ウィンドウのコントローラのデータ一覧にある"パラメータ"を開くと表示されます (下図参照)。
2
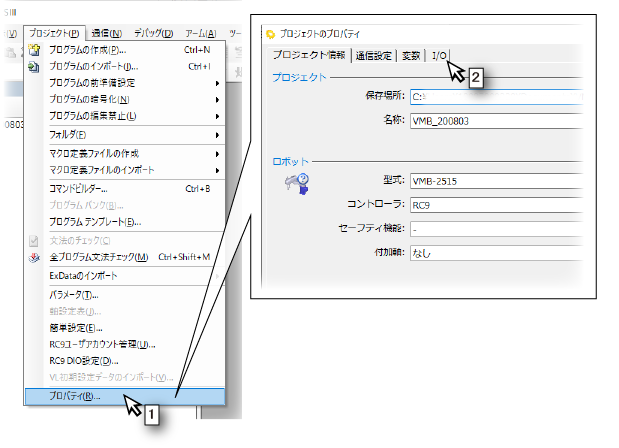
パラメータを設定するウィンドウを表示します。
- [プロジェクト]メニューから[プロパティ]を選択します。
- [プロジェクトのプロパティ]ウィンドウの[I/O]タブをクリックします。
3
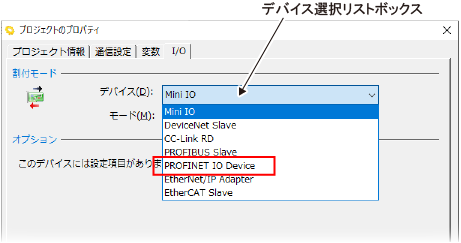
既存のロボットコントローラにPROFINET RTデバイスターミナルを追加した場合は、デバイスの変更が必要です。
[デバイス選択リストボックス]から"PROFINET IO Device"を選択してください。
4
入力モジュール、出力モジュールにそれぞれにI/O割付を行います。これにより最大汎用入出力点数が決まります。詳細は「仕様とI/O割付 」を参照してください。
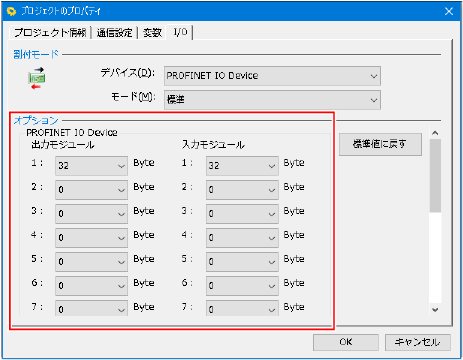
| 入出力モジュール | 設定範囲 (バイト) | デフォルト(バイト) |
|---|---|---|
| 1 | "32"または "64" | 32 |
| 2 ~ 15 | "0", "32", "64" のいずれか | 0 |
5
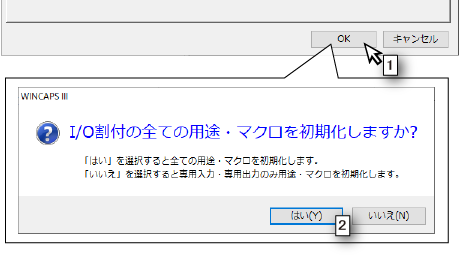
- [OK]ボタンをクリックします。
- I/O割付の初期化をするかどうか選択するウィンドウが表示されるので、「はい」か「いいえ」のどちらかをクリックします。
6
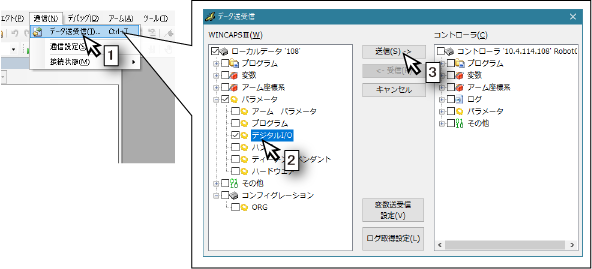
設定した内容をロボットコントローラに送信します。
- [通信]メニューから[データ送受信]を選択します。
- [WINCAPSIII]枠の[パラメータ]を開き[デジタルI/O]にチェックを入れます。
- [送信]ボタンをクリックします。
7
- [RC9にログイン]ウィンドウが表示されるので、ロボットコントローラに設定しているユーザの内、ユーザーレベルが "プログラマ" 以上のアカウントを選択します。
- パスワードを入力します。
- [ログイン]ボタンをクリックします。
- 送信が完了した旨を伝えるウィンドウが表示されたら[OK]ボタンをクリックします。
- ロボットコントローラを再起動します。

コントローラを再起動しないと、送信したデータは反映されません。コントローラを再起動していない状態では使用しないでください。
ID : 10829