
ID : 10800
監視モデルの作成
WINCAPSIIIのアームモデリング機能で監視モデルを作成し、データを出力します。
監視モデルの作成手順
1
WINCAPSIIIの"簡易モデリング機能"でモデルを作成します。
監視モデルを作成する場合、各監視モデルによって制約があります。詳しくは "監視モデル作成時の制約" を参照してください。
2
対象のオブジェクトを選択し、[干渉チェック]を有効にします。
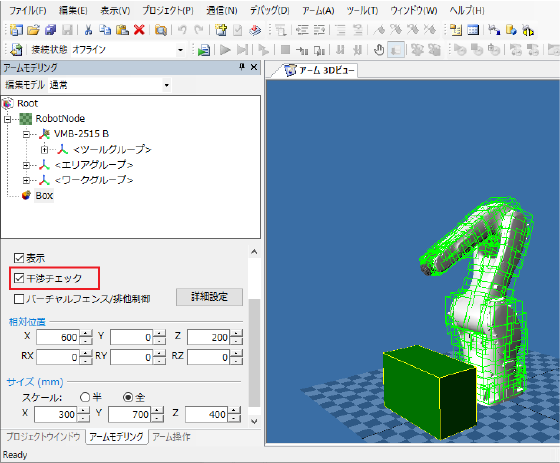
3
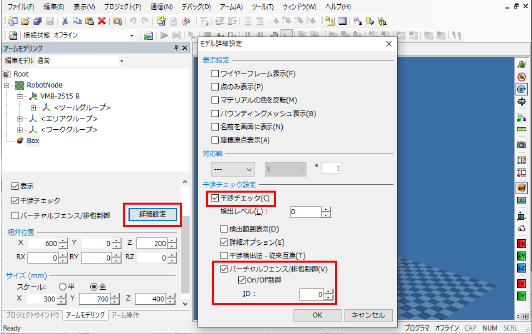
[詳細設定]から[モデル詳細設定]を開き、バーチャルフェンスを有効にします。
[On/Off制御]にチェックをし、ID番号 (0~999) を付けると、バーチャルフェンスの専用コマンドで監視のOn/Off切替が可能です。
[検出範囲表示]を有効にすると監視モデルが表示されます。
ロボットは常に干渉チェックが有効になっています。
4
検出レベルを設定します。
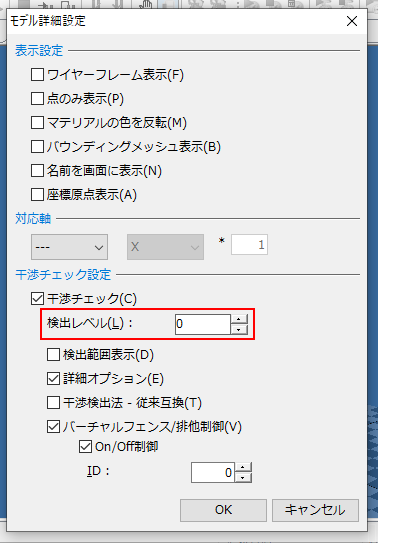
レベルを高くすると、精度がよくなり細かい監視ができるようになりますが、高くしすぎると処理時間が長くなり、処理時間遅延エラーが発生する可能性があります。
5
監視したいすべてのモデルについて、STEP2からSTEP4を繰り返します。
6
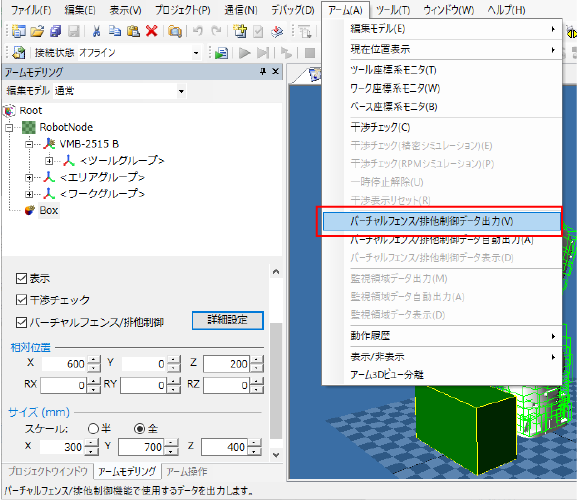
バーチャルフェンスのデータをコントローラで処理できるデータに変換、保存します。出力したバーチャルフェンスのデータを確認したい場合は、[バーチャルフェンス/排他制御データ表示]で確認できます。
操作経路 : メニュー[アーム] - [バーチャルフェンス/排他制御データ出力]
[バーチャルフェンス/排他制御データ出力]を実行した際に、ロボットと設備モデルが干渉する場合があります。 その場合は、干渉している設備モデルの[干渉チェック]と[バーチャルフェンス]のチェックを外してから、再度[バーチャルフェンス/排他制御データ出力]を実行し、ロボットを退避させてください。
ロボットを退避させた後に、[干渉チェック]と[バーチャルフェンス]のチェックを元に戻し、[バーチャルフェンス/排他制御データ出力]を実行して、バーチャルフェンスの監視をもう一度有効化してください。
7
データをコントローラへ送信します。
WINCAPSIIIガイドの "通信設定" および "データの送受信" を参照してください。
データ送信後、コントローラを再起動してください。
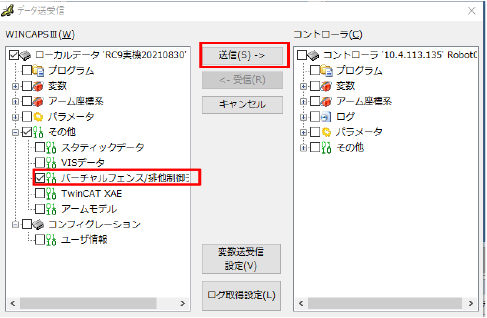
- この作業を行うには、コントローラとWINCAPSIIIが通信可能になっている必要があります。
通信設定の方法については、WINCAPSIIIガイドの "ロボットコントローラとの通信" を参照してください。 - [アームモデル]にチェックを入れると、バーチャルフェンス/排他制御データの作成基のモデルデータをコントローラに送信できます。ただし、コントローラ内に保存領域が不足している場合は、アームモデルの項目は表示されません。
8
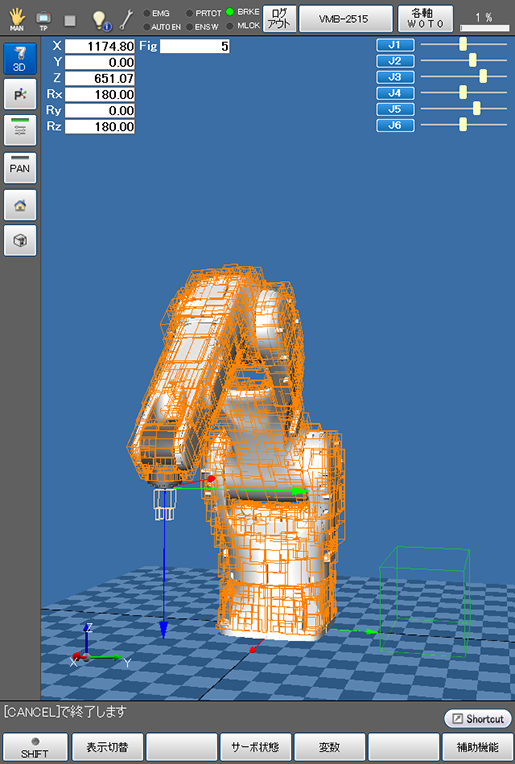
スマートTPでアーム画面を開きます。
監視モデルを表示するには、表示したい監視モデルの表示設定と、パラメータの[366 : バーチャルフェンス設定]を有効にし、コントローラの再起動をしてください。
ロボットモデルはオレンジ、常時監視するモデルはベージュ、監視の切替えが可能なモデルは緑 (監視有効時のみ) で表示します。
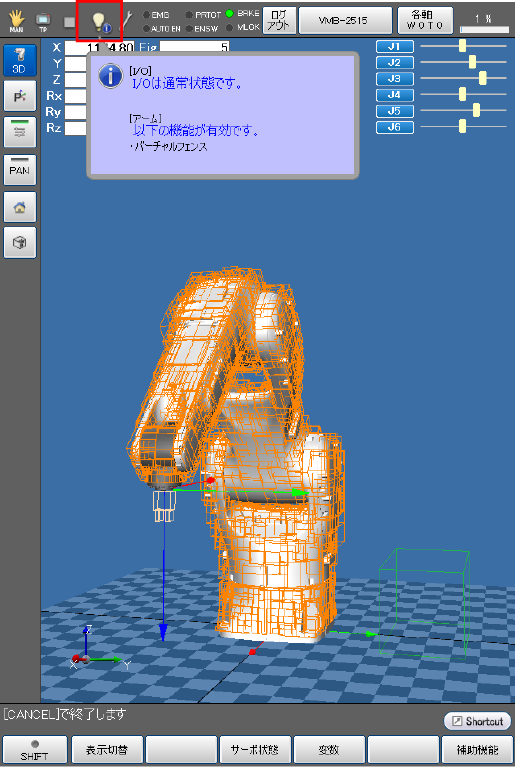
バーチャルフェンスが有効な場合は、ステータスバーの[I/O状態・アーム状態]のアイコンが図のようになります。アイコンをタッチすると、詳細な情報が分かります。
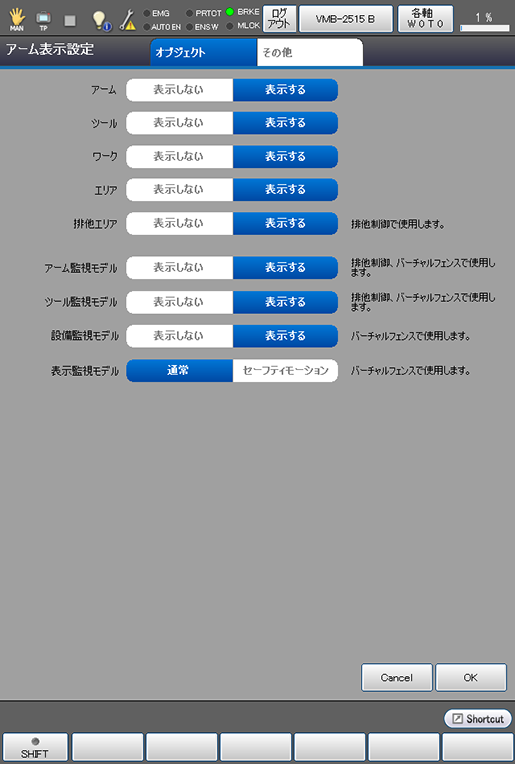
監視モデルの表示/非表示
監視モデルの表示、非表示を設定できます。
操作経路 : 基本画面 - [F2 アーム] - [F6 補助機能] - [F7 表示設定]
表示、非表示を変更後、[OK]を押します。
ID : 10800