
ID : 10540
ロボット本体の運搬方法
運搬時の注意
VMBシリーズのロボットは、質量が約250 kgあります。ロボットの運搬には、十分な性能のクレーンまたはリフトを使用してください。
- 作業者は安全靴、手袋、安全めがね、ヘルメット等の安全を確保できる装備をしてください。
- 周囲の作業スペースは十分に確保してください。
- ロボットの吊り上げには、十分な能力のあるクレーンおよびフォークリフトを使用してください。
- ロボットの回転は専用の治具など作成し、安全に行ってください。
- ロボットを持上げるときや設置方向へロボットを回転するときに手や体を挟む可能性のある箇所は事前にチェックし、挟むことのない処置をしてください。
- 吊り上げたロボットの下に入らないようにしてください。
- ワイヤは、所定の吊りボルト(アイボルト)に固定してください。吊りボルト以外の場所に固定して吊すと、破損し怪我をする危険があります。
ロボットの運搬姿勢
移設する場合は下記のようにバランスの取れる姿勢にしてから運搬してください。

運搬する場合に比較的バランスのよいロボットの姿勢
VMB-2515
| 軸番号 | 角度[deg] |
|---|---|
| J1 | 0° |
| J2 | -13° |
| J3 | 170° |
| J4 | 0° |
| J5 | 0° |
| J6 | 0° |
VMB-2518
| 軸番号 | 角度[deg] |
|---|---|
| J1 | 0° |
| J2 | -10° |
| J3 | 170° |
| J4 | 0° |
| J5 | 0° |
| J6 | 0° |
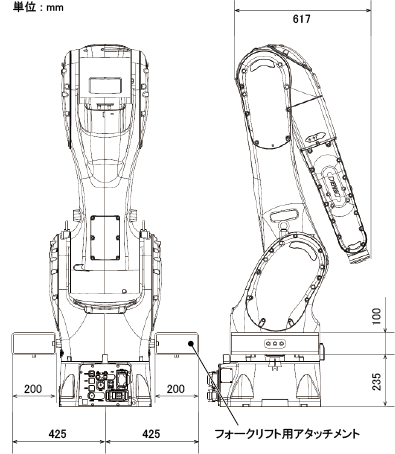
フォークリフトによる運搬
フォークリフトにて運搬する際には、以下のフォークリフトセットを使用してください。
ロボットを運搬するとき以外は、フォークリフト用アタッチメントを取り外してください。
フォークリフト用アタッチメントセット
| 品名 | 個数 |
|---|---|
| フォークリフト用アタッチメント | 2個 |
| 六角穴付きボルトM12×30 強度区分12.9 | 6個 |
| 締め付けトルク | 42±8Nm |
|---|
外付けバッテリユニットを接続しているロボットの注意
外付けバッテリユニットを接続しているロボットは、本体内部のエンコーダバックアップ電池を取外しています。ロボットを移設するときや、運搬、取外しするときなど、ロボットから外付けバッテリボックスを取り外すときは、ロボット内のエンコーダバックアップ電池を再度取付けてください。ロボット内にエンコーダバックアップ電池を取り付けないまま、外付けバッテリユニットを取外すと、エンコーダデータが消失します。外付けバッテリユニットを取外す前に、ロボット本体内にエンコーダバックアップ電池が入っていることを確認してください。
ID : 10540