
ID : 10541
ロボット本体の固定方法
ここでは、以下の項目について説明しています。
固定方法
ロボットを床に直接固定することは想定していませんので、ロボット取付け面とコンクリート面の間に架台やロボット固定用プレートを設置する必要があります。
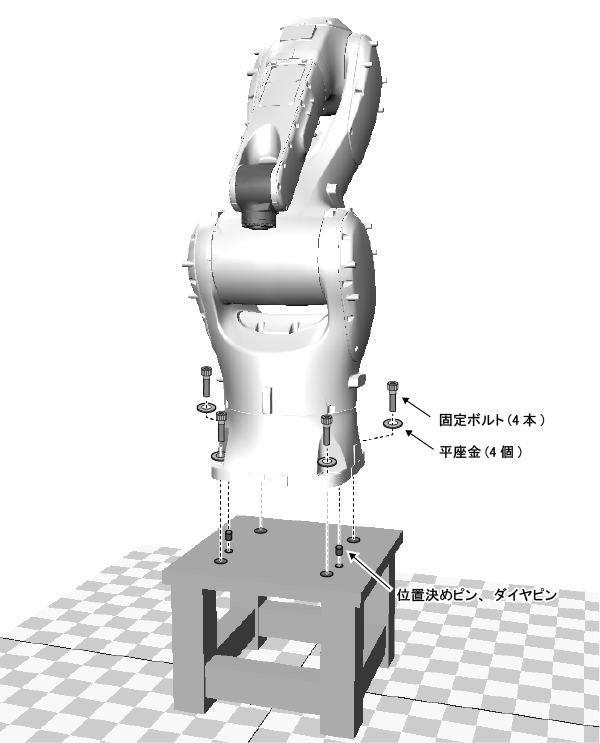
ロボットを固定するには、下図のように、固定ボルト、位置決めピン、ダイヤピンを使用します。したがって、架台には固定ボルト用にタップと、位置決めピン、ダイヤピン用の穴を設けておく必要があります。
固定時には位置決めピンとダイヤピンもしくは基準面を使用して必ず位置決めをしてください。保守作業時などで、ロボット本体を脱着したときに、位置ずれを最小限に抑えることができます。
タップと穴の位置
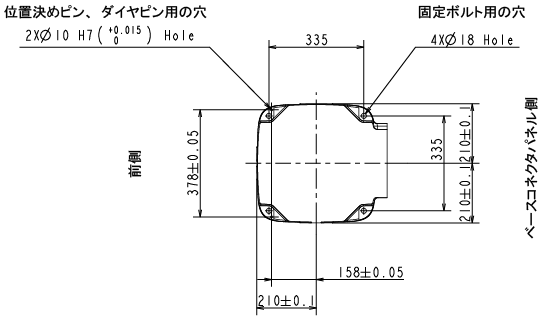
下図は、ロボットのベース部分を上から見たときの各穴の位置を示したものです。
下図を参考に固定ボルト用のタップおよび、位置決めピン、ダイヤピン用の穴を架台に用意してください。
タップの深さは30mm以上としてください。
固定ボルトと位置決めピン、ダイヤピン
固定ボルトはお客様で別途ご用意ください。下記の内容を推奨しています。
- 固定ボルト
- 仕様 : M16×65 (強度区分12.9)
- 締め付けトルク : 317 ±63 Nm
- 平座金
- 仕様 : JIS B 1256 (みがき丸)
位置決めピンとダイヤピンはロボットに同梱されています。各ピンの寸法は下図のとおりです。
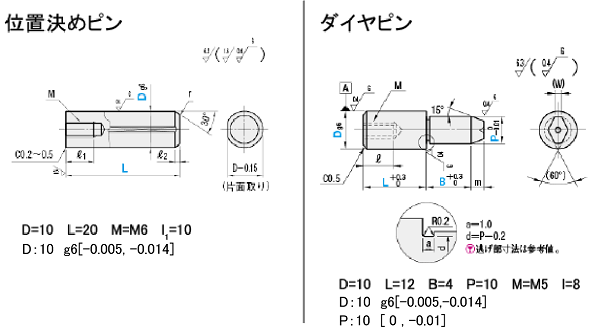
架台にピン用の穴(φ10H7深さ10㎜)を空けます。
ダイヤピンを使用する際は、ダイヤピンの向きに注意してください。下図のように、ダイヤピンの山が位置決めピンの方を向くようにしてください。
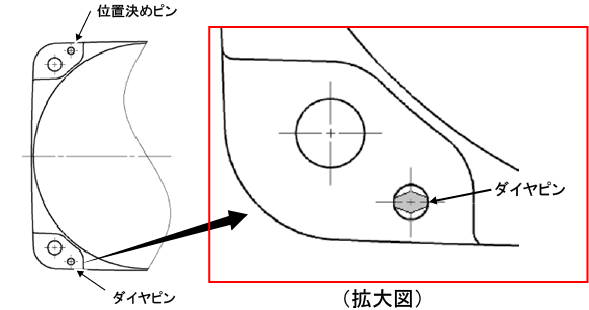
ノックピンを打ち込み固定下さい。保守作業時などで、ロボット本体を脱着したときに、位置ずれを最小限に抑えることができます。
ロボットを傾斜に設置する場合
ロボットを傾斜に設置する場合は、以下の図に従いJ1の動作角度範囲を決定する必要があります。 この際、動作範囲の外側5°~20°程度にストッパを設けてください。
設置面傾斜角度によるJ1動作角度範囲
| 型式 | 傾斜角度 | 動作範囲 | 型式 | 傾斜角度 | 動作範囲 | |
|---|---|---|---|---|---|---|
| VMB-2515 | 0°~35° | ±170° | VMB-2518 | 0°~30° | ±170° | |
| 35° | ±63° | |||||
| 40° | ±66° | 40° | ±52° | |||
| 45° | ±55° | 45° | ±45° | |||
| 50° | ±48° | 50° | ±41° | |||
| 55° | ±44° | 55° | ±37° | |||
| 60° | ±41° | 60° | ±35° | |||
| 65° | ±38° | 65° | ±33° | |||
| 70° | ±37° | 70° | ±31° | |||
| 75° | ±35° | 75° | ±30° | |||
| 80° | 80° | |||||
| 85° | ±34° | 85° | ±29° | |||
| 90° | 90° | |||||
| 95° | 95° | |||||
| 100° | ±35° | 100° | ±30° | |||
| 105° | 105° | |||||
| 110° | ±37° | 110° | ±31° | |||
| 115° | ±38° | 115° | ±33° | |||
| 120° | ±41° | 120° | ±35° | |||
| 125° | ±44° | 125° | ±37° | |||
| 130° | ±48° | 130° | ±41° | |||
135° |
±55° | 135° |
±45° | |||
| 140° | ±66° | 140° | ±52° | |||
| 145°~180° | ±170° | 145° | ±63° | |||
| 150°~180° | ±170° | |||||
| 詳細はグラフ参照 | 詳細はグラフ参照 | |||||
ID : 10541
- このページに関連する情報
- 床置き設置時の固定方法