
ID : 10192
ロボットの手先に加わる力の確認
ここでは、以下の項目について説明しています。
力の許容値
ロボットのツールを設計/選定するときは、以下の項目がロボットの仕様を超えないようにしてください。(ロボット本体の仕様参照)
- 最大可搬質量
- 最大許容イナーシャ(慣性モーメント)
- 最大許容モーメント
上記項目との比較では、ツールだけでなく、ツールを固定する金具やワークピースおよび配線·配管など、フランジに負荷をかけるものすべてを考慮に入れてください。
また、ツール(ワークピースを含む)は振動しないようにしてください。
上記の内容を守らない場合、ロボット本体の各締結部にゆるみ、ガタが発生し、位置ズレする可能性があり、ロボットおよびロボットコントローラが破損する危険があります。
微低速での動作が続く場合、過負荷のエラーが発生することがあります。
質量と重心の位置から、許容値の範囲内かどうかを確認する方法
ロボットの手先に加わる慣性モーメントやモーメントは、ツールやワークピースなど、フランジに負荷をかけるもの(以降 フランジにかかる総負荷)の形状を、各力の計算公式に当てはめて算出する必要があります。
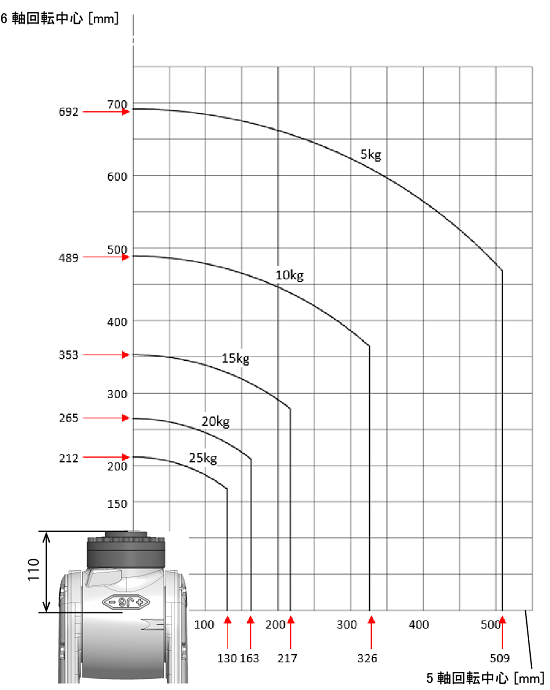
しかし、フランジにかかる総負荷の、質量と重心の位置が分かっている場合、下図のグラフを使用して、許容値の範囲内かどうかを確認することができます。
下図は、ロボットの6軸および5軸の回転中心から、フランジにかかる総負荷の重心位置までの距離が、どこまでだと許容値内に収まるかということを、質量別に表したものです。
例えば、フランジにかかる総負荷の質量が10kgであった場合を説明します。この場合、図の"10kg"の枠内に、フランジにかかる総負荷の重心位置があれば、フランジにかかる慣性モーメントとモーメントは、許容値以内であると判断することができます。
ただし、下図のグラフは、フランジにかかる総負荷の体積が比較的小さい場合のものです。フランジにかかる総負荷の体積が大きい場合は"慣性モーメントの計算方法"を参考に、各力を算出して、許容値以内であることを確認してください。
慣性モーメントの計算方法
フランジにかかる総負荷が、4軸、5軸、6軸回りに加える慣性モーメントを求めるときには、下記の計算式を参考にしてください。
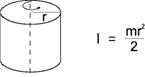
1. 円柱(1) (回転軸=中心軸)
|
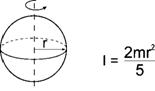
4. 球 (回転軸=中心軸)
|
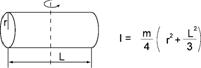
2. 円柱(2) (回転軸が重心を通る)
|
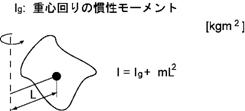
5. 重心位置が回転軸上にない
|
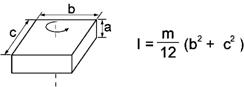
3. 直方体 (回転軸が重心を通る)
|
I : 慣性モーメント 〔kgm2〕 m : 質量 〔kg〕 r : 半径 〔m〕 a、b、c、L : 長さ 〔m〕 |
計算例
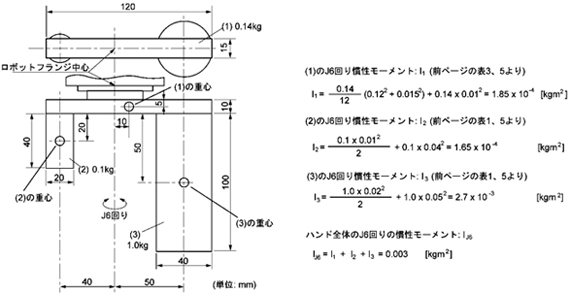
複雑な形状の慣性モーメントを計算する場合は、できる限り簡単な部分に分割して計算します。
下図に示すような3部品(1)、(2)、(3)に分割して計算します。
6軸回り慣性モーメント
 |
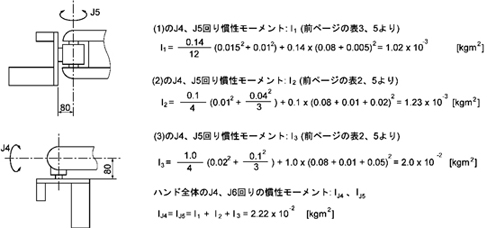
4軸、5軸回り慣性モーメント
下図のような場合、4軸、5軸回りの慣性モーメントは同じ計算で求めることができます。
 |
ID : 10192