
ID : 7793
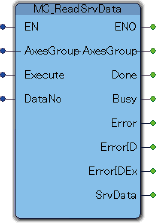
MC_ReadSrvData
读取机器人所有轴的伺服内部数据。
| 图形显示 | FB范畴 | |
|---|---|---|
 |
非动作 | |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可以 | ||
|
||||
输入变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可以 |
|
||||
| DataNo | INT | 1,2,4,5,7,8,17,18,19,20 | 1 | 不可以 |
|
||||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
|
| SrvData | eRC_Joint |
|
功能说明
| 数据编号 | 数据的种类 | 单位 |
|---|---|---|
| 1 | 电机速度当前值 | rpm |
| 2 | 电机角度偏差 | mm or deg |
| 4 | 电机电流绝对值 | 额定比 % |
| 5 | 电机扭矩指令值(除去重力补偿部分) | 额定比 % |
| 7 | 负载率 | % |
| 8 | 各轴位置、角度指令值 | mm or deg |
| 17 | 工具端速度(仅工件坐标系、位置3分量) | mm/s |
| 18 | 工具端偏差(仅工件坐标系、位置3分量) | mm |
| 19 | 工具端速度(仅工具坐标系、位置3分量) | mm/s |
| 20 | 工具端偏差(仅工具坐标系、位置3分量) | mm |
注意事项
-
ID : 7793