
ID : 7770
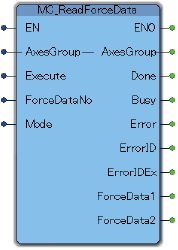
MC_ReadForceData
返回力量控制的各要素的数据。
| 图形显示 | FB范畴 | |
|---|---|---|
 |
非动作 | |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可以 | ||
|
||||
输入变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可以 |
|
||||
| ForceDataNo | INT | 0~15 | 0 | 不可以 |
|
||||
| Mode | INT | -1, 0 | 0 | 不可以 |
|
||||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
|
| ForceData1 | eRC_Vector |
|
|
| ForceData2 | eRC_Vector |
|
功能说明
| 数据编号 | 要求数据1 |
要求数据2 |
|---|---|---|
| 0 | 力量控制坐标系中的传感器值[N] | 力量控制坐标系中的传感器值[Nm] |
| 1 | 传感器输出值[pulse/N] | 传感器输出值[pulse/Nm] |
| 2 | 力量控制坐标系中的力的正峰值[N] |
力量控制坐标系中的力矩的正峰值[Nm] |
| 3 | 力量控制坐标系中的力的负峰值[N] | 力量控制坐标系中的力矩的负峰值[Nm] |
| 4 | 力量控制开始时力量控制坐标系中的前端位置的位移量(指令值)[mm]。 | 力量控制开始时力量控制坐标系中的前端位置的位移量(指令值)[deg]。 |
| 5 | 力量控制开始时力量控制坐标系中的前端位置位移量的正峰值(指令值)[mm]。 | 力量控制开始时力量控制坐标系中的前端位置位移量的正峰值(指令值)[deg]。 |
| 6 | 力量控制开始时力量控制坐标系中的前端位置位移量的负峰值(指令值)[mm]。 | 力量控制开始时力量控制坐标系中的前端位置位移量的负峰值(指令值)[deg]。 |
| 7 | 力量控制开始时力量控制坐标系中的前端位置的位移量(当前值)[mm]。 | 力量控制开始时力量控制坐标系中的前端位置的位移量(当前值)[deg]。 |
| 8 | 力量控制开始时力量控制坐标系中的前端位置位移量的正峰值(当前值)[mm]。 | 力量控制开始时力量控制坐标系中的前端位置位移量的正峰值(当前值)[deg]。 |
| 9 | 力量控制开始时力量控制坐标系中的前端位置位移量的负峰值(当前值)[mm]。 | 力量控制开始时力量控制坐标系中的前端位置位移量的负峰值(当前值)[deg]。 |
| 10 | 力量控制开始时力量控制坐标系中的指令值和力量控制指令值的偏差[mm]。 | 力量控制开始时力量控制坐标系中的指令值和力量控制指令值的偏差[deg]。 |
| 11 | 力量控制开始时力量控制坐标系中的指令值和力量控制指令值的偏差的正峰值[mm]。 | 力量控制开始时力量控制坐标系中的指令值和力量控制指令值的偏差的正峰值[deg]。 |
| 12 | 力量控制开始时力量控制坐标系中的指令值和力量控制指令值的偏差的负峰值[mm]。 | 力量控制开始时力量控制坐标系中的指令值和力量控制指令值的偏差的负峰值[deg]。 |
| 13 | 传感器值的力[N] | 传感器值的力矩[Nm] |
| 14 | 传感器值的力的正峰值[N] | 传感器值的力矩的正峰值[Nm] |
| 15 | 传感器值的力的负峰值[N] | 传感器值的力矩的负峰值[Nm] |
注意事项
-
ID : 7770