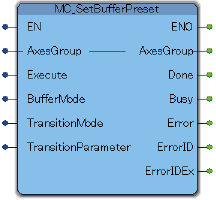
MC_SetBufferPreset
| 图形显示 |
FB范畴 |
 |
动作 |
输入输出变量
| 变量名 |
数据型 |
有效范围 |
初始值 |
省略 |
| AxesGroup |
eRC_AxesGroup |
不可以 |
- 机器人组
- 指定用户定义型的机器人变量(结构体: eRC_AxesGroup)。
|
输入变量
| 变量名 |
数据型 |
有效范围 |
初始值 |
省略 |
| Execute |
BOOL |
|
FALSE |
不可以 |
- 开始执行
- 从FALSE变为TRUE后,执行这个FB。
|
| BufferMode |
INT |
0,1,6,7,8,9 |
0 |
不可以 |
- 缓冲模式选择
- 指定在机器人动作中执行这个FB时,如何将动作连在一起。
各缓冲模式的处理流程如下所示。
[ 0 : Aborting OP0(中断) ]
- 机器人以减速度100%减速。
- 机器人停止(结束动作)。
- 执行这个FB的动作。
[ 1 : Buffered(保持) ]
- 机器人移动到当前的目标位置。
- 机器人停止(编码器值确认动作(轴坐标))。
- 执行这个FB的动作。
[ 6 : Blending(混在) ]
- 机器人移动到当前目标位置的旁边。
- 机器人实施在输入变量“TransitionMode”中指定的动作结束方法。
- 执行这个FB的动作。
[ 7 : Aborting OP1(中断) ]
- 机器人以减速度100%减速。
- 机器人不停止(通过动作)。
- 执行这个FB的动作。
[ 8 : Aborting OP2(中断) ]
- 机器人用当前的减速度减速。
- 机器人停止(结束动作)。
- 执行这个FB的动作。
[ 9 : Aborting OP3(中断) ]
- 机器人用当前的减速度减速。
- 机器人不停止(通过动作)。
- 执行这个FB的动作。
|
| TransitionMode |
INT |
0,3,10,11 |
0 |
不可以 |
- 迁移模式选择
-
指定在输入变量“BufferMode”下指定“6 : Blending(混在)”时,当前动作的结束方法。
针对各值的结束方法如下所示。
[ 0 : 机器人停止(编码器值确认动作(轴坐标))]
[ 3 : 机器人不停止(距离指定通过动作)]
-
如果指定了3,请指定通过输入变量“TransitionParameter”开始通过动作的距离。
- [ 10 : 机器人不停止(通过动作)]
[ 11 : 机器人停止(编码器值确认动作(位置坐标))]
|
| TransitionParameter |
INT |
0~32767 |
0 |
不可以 |
- 迁移参数
-
指定在输入变量“TransitionMode”中指定了“3 : 机器人不停止(距离指定通过动作)”时,开始通过动作的距离。单位为(mm)。
机器人位置和当前目标位置的距离达到这个参数("TransitionParameter")的值以下时,开始通过动作。
|
输出变量
| 变量名 |
数据型 / 说明 |
| Done |
BOOL |
- 执行完毕确认
- TRUE: 这个FB已执行完毕。
FALSE: 这个FB未执行完毕。
|
| Busy |
BOOL |
- 这个FB的处理状态
- TRUE:正在执行这个FB。
FALSE: 未执行这个FB。
|
| Error |
BOOL |
- 有无错误
- TRUE : 这个FB异常结束。
FALSE : 这个FB正常结束。
|
| ErrorID |
WORD |
- 错误的发生源
- 2800 (16进制) : PLC的程序发生错误。
2801 (16进制) : 机器人控制器发生错误。
|
| ErrorIDEx |
DWORD |
- 错误编码
- 确定错误内容的编号。
详细内容请参照“错误编码一览”。
|
功能说明
-
注意事项
若要执行这个FB,需要事先将FB范畴"动作"的FB设为可执行状态。
若要将FB范畴"动作"的FB设为可执行状态,使用FB"MC_Power"。
