
ID : 6129
与WINCAPSIII的连接设定
EtherNet连接时
机器人控制器的设定
设定机器人控制器,以便可以通过以太网进行PC(WINCAPSIII)和机器人控制器通信。通过多功能教导器进行该设定。
设定通信权及IP地址。
1
在多功能教导器的基本画面中按压[F6 设定]。
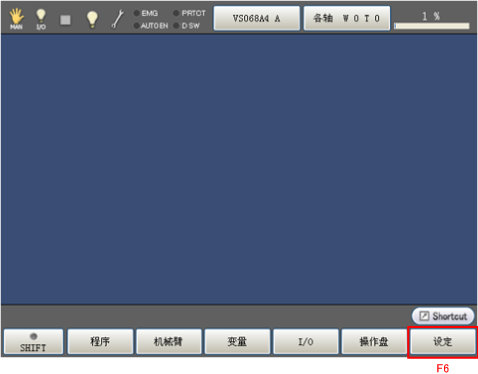
显示“设定(主画面)”视窗。

2
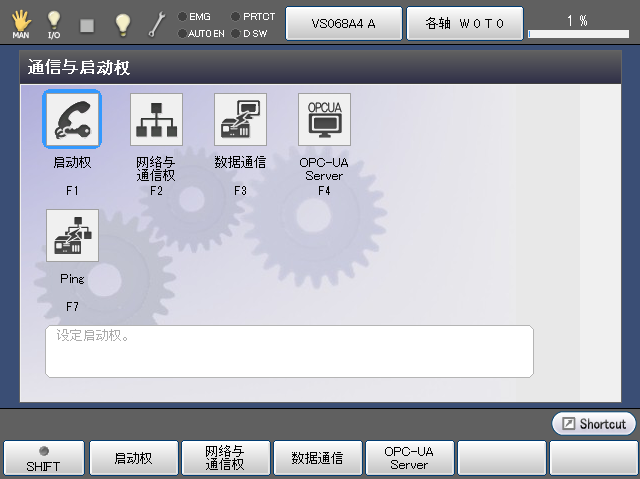
按压[F5 通信与启动权]。

显示通信设定的[菜单]视窗。
3
按压[F2 网络与通信权]。

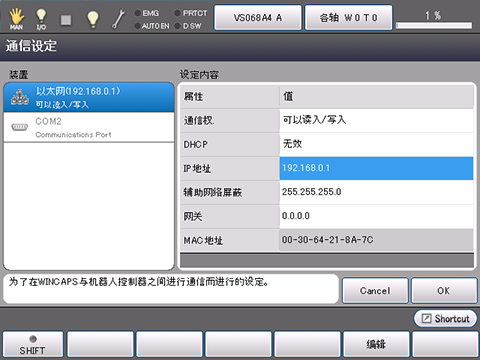
显示[通信设定]视窗。
4
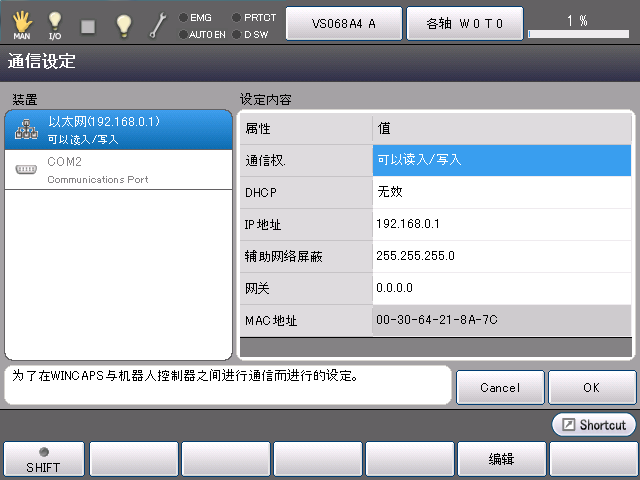
使用光标键或漫步旋钮,或者直接触摸画面,选择[通信权]。
直接触摸画面也可进行选择。
所选择的部分反衬显示。
5
按压[F5 编辑]。
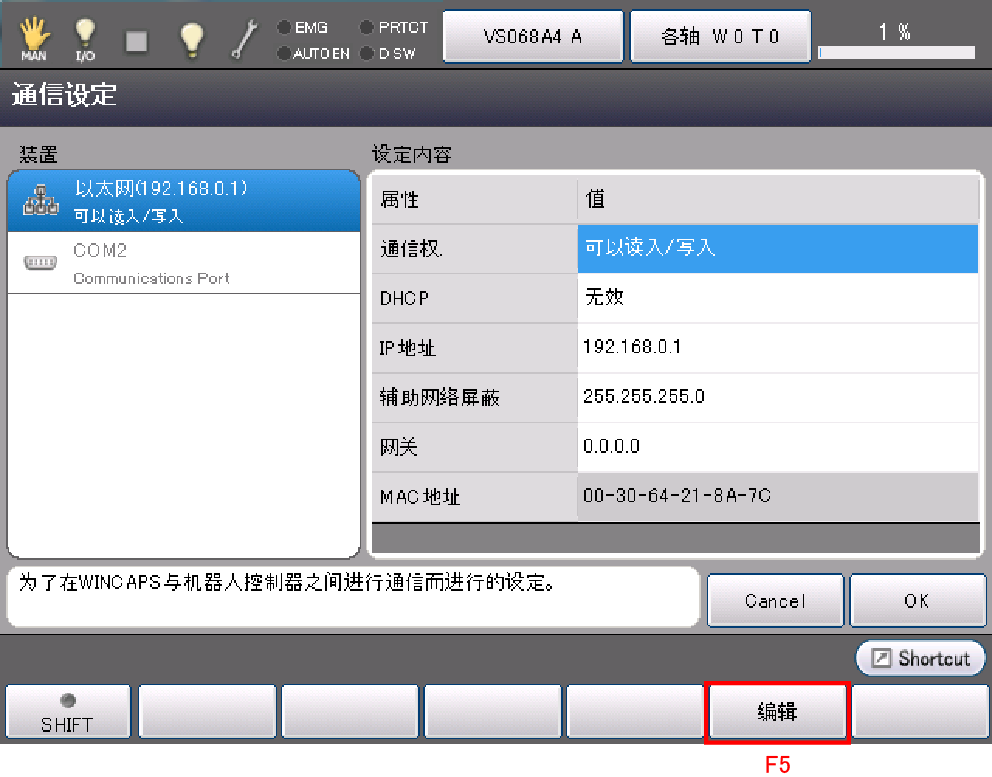
显示如下系统讯息。
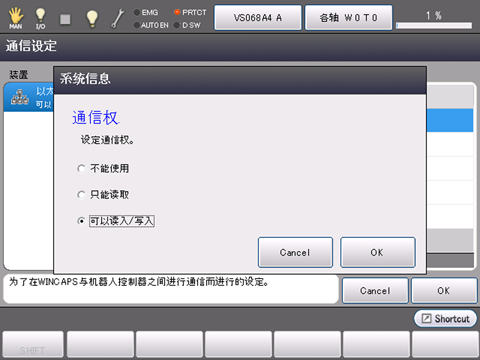
6
选择[可以读入/写入]。
通信权的含义如下所示。使用EtherNet时,需要选择[可以读入/写入]。
- 不能使用:不使用通信端口。
- 只能读入:可在计算机侧读取机器人控制器的数据。不能通过计算机将数据发送至机器人控制器。
- 可以读入/写入:计算机和机器人控制器之间可进行双向数据交换。
选择后按压[OK]。显示返回[通信设定]视窗。
7
使用光标键或漫步旋钮,或者直接触摸画面,选择[IP地址]。
所选择的部分反衬显示。
8
按压[F5 编辑]。
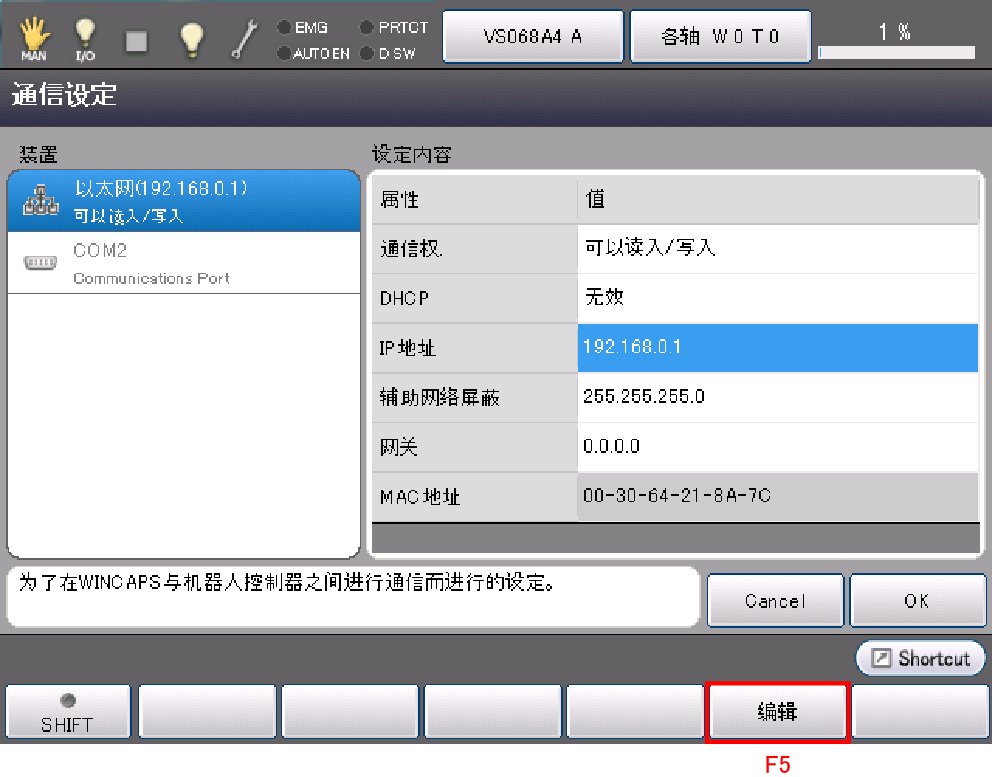
显示下一步骤所示的数字键。
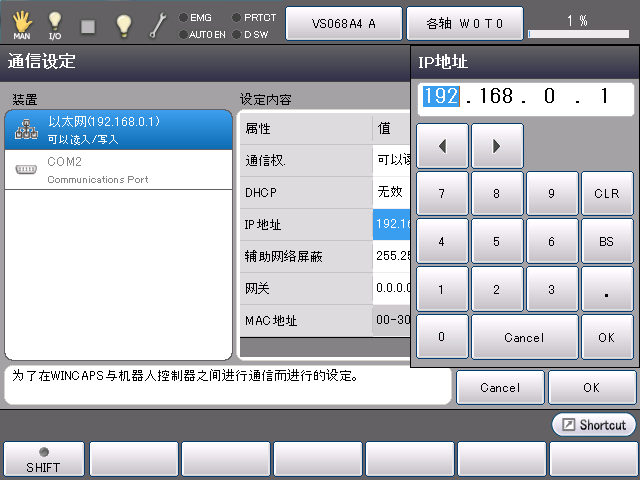
9
通过数字键输入地址。
输入完成后,按压数字键上的[OK]。
按压[OK]后,将返回[通信设定]视窗。
需变更辅助网络屏蔽时,参照步骤7至9的操作方法进行相同变更。
10
按压通信设定画面中的[OK]。
返回至通信设定的[菜单]视窗。
11
按压2次多功能教导器的[Cancel]按钮。
显示返回基本画面。
如果追加推荐端口列表的LAN适配器,可使用多个以太网IP地址。
设定了相同的网络IP地址时,通信可能失败。
- 失败例子
LAN1:192.168.0.1
LAN2:192.168.0.2 - 修订例子
LAN1:192.168.0.1
LAN2:192.168.1.2
ID : 6129