
ID : 5840
现场总线参数的设定
通过多功能教导器设定机器人控制器。
基本画面-[F4 I/O]-[F6 辅助功能]-[F4 现场总线参数]
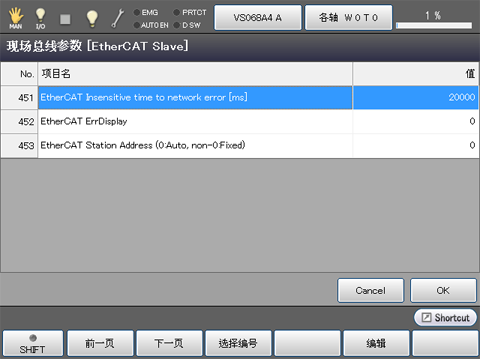
EtherCAT 异常检测等待时间
启动机器人控制器,如果到开始EtherCAT通信的通信状态检测的时间较短,则启动后立即输出8350200B“正在准备现场网络通信”。 在该情况下,延长并调整异常检测等待时间(ms)。
| EtherCAT 异常检测等待时间[ms] | 设定范围 | 默认 |
|---|---|---|
| 值 | 0~65535 | 20000 |
EtherCAT 异常显示
设定是否每次都进行网络异常检测。
为了设备动作时的安全,默认设定为“0”,在每次执行I/O输出入处理时,进行错误显示。调整未确立网络的设备时,对模拟I/O的程序运行进行确认时,请设定为“1”。由于检测到第一次的网络错误之后,即使检测到相同的错误也不会进行错误显示,所以可以根据该设定对程序的动作进行确认。
| EtherCAT 异常显示 | 仅第一次 | 每次(默认) |
|---|---|---|
| 值 | 1 | 0 |
调整结束之后,请务必将设定返回到“0”。
EtherCAT Station Address
设定EtherCAT的节点地址。
EtherCAT Station Address |
手动设定 | 主局的自动设定 (默认) |
|---|---|---|
| 值 | 1~65535 | 0 |
ID : 5840
- 本页相关信息
- 关于与OMRON公司生产的PLC的连接