
ID : 5638
附录
就工序间运输机器人相关的其它注意事项进行说明。
关于CP动作
工序间运输机器人不支持CP动作。
详细内容如下所示。
- 在多功能教导器的动作模式下,不可选择XY、工具动作(仅可选择各轴动作)
- 不可通过多功能教导器的变量移动选择P型、T型变量(J型变量移动仅可选择PTP动作)
- 不支持TOOL等工具、工件、区域功能相关的定义语句
- 指定MOVE等机器人控制语句时,插补方法不支持CP动作(L、C、S)、指定坐标不支持P型、T型变量
关于机械臂3D视图
由于为省略电缆支架等的简易建模,因此工序间运输机器人不支持干涉检查。请用于动作确认。另外,L轴的行程长度为默认值。请根据需要进行变更。
以下对变更方法进行说明。
- L轴行程长度的默认值
| 轴 | 行程长度的默认值 |
|---|---|
| L轴 | 1,000 mm |
L轴行程长度的变更
从机械臂建模的分类目录中选择模型“L”。另外,确认“倍率”-“标度”变为“全”,并在“X”处输入L轴的行程长度。
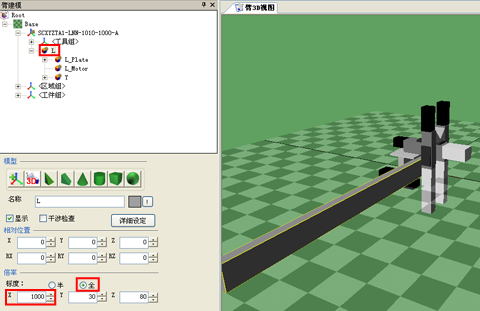
- 变更时的设定项目
| 机械臂建模的分类目录 | 倍率 | |
|---|---|---|
| 选择“L” | 选择标度“全” | 在“X”处输入L轴的行程长度(mm) |
变更L轴软件限制
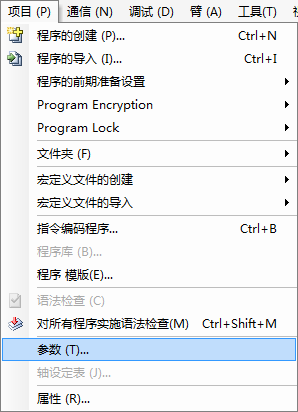
选择“项目”-“参数”。
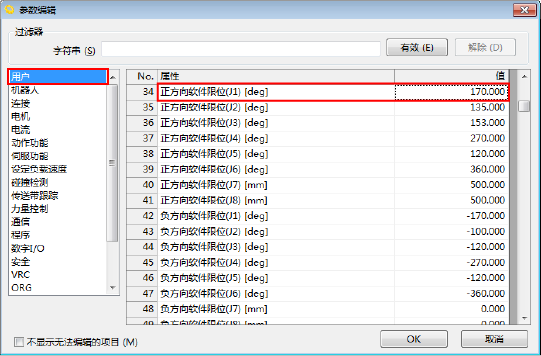
从“参数编辑”画面中选择“用户”-“正方向软件限位(J1)[mm]”。在“值”中输入设定值。
至此,行程长度以及软件限制的变更结束。
ID : 5638