
ID : 5624
间隙调整
为防止振动和噪音,提高停止位置的精度,需要适当调整间隙。调整方法如下所示。
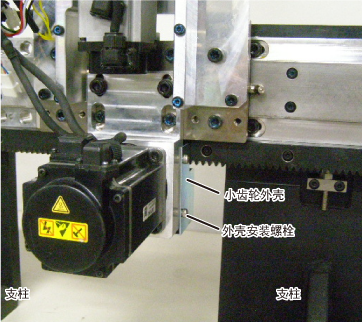
1
将机器人本体向支柱和支柱间附近移动,拆下4个外壳安装螺栓后拆下小齿轮外壳。
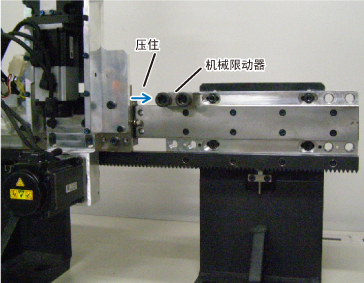
2
将机械限动器安装到下图位置,将机器人本体固定到机械限动器上。
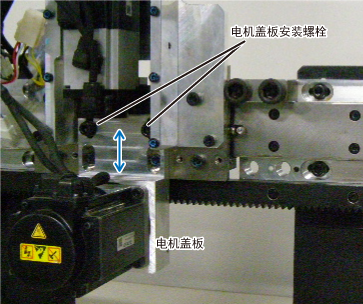
3
轻轻松开电机盖板安装螺栓,使电机盖板不会发生晃动。
4
相反电机侧看到的机器人本体。用手顺时针旋转小齿轮,使小齿轮的齿对准齿条的齿的左侧。
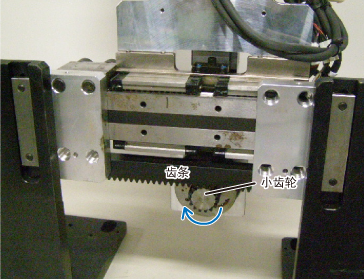
5
将千分表安装到小齿轮的齿上,用手逆时针旋转小齿轮,确认间隙量。
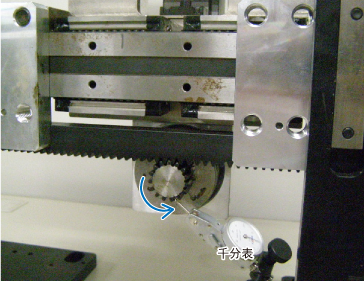
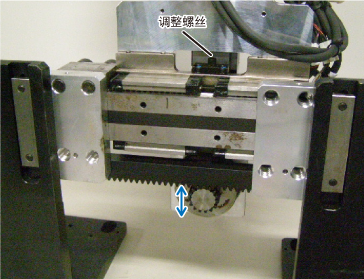
6
使用7mm螺丝钳,通过调整螺丝上下移动小齿轮,将间隙量调整至0.04至0.06mm。
调整螺丝旋转1圈为360°,导程上下移动0.8mm。
7
调整结束后,拧紧2处电机盖板安装螺栓。
| 安装扭矩 | 9.8N・m ± 10% |
|---|
8
机械限动器返回原位置。
9
按照原样安装小齿轮外壳。
| 安装扭矩 | 2.9N・m ± 20% |
|---|
至此,间隙调整结束。
ID : 5624