
ID : 5610
规格和变化
| 项目 | 规格 | ||||
|---|---|---|---|---|---|
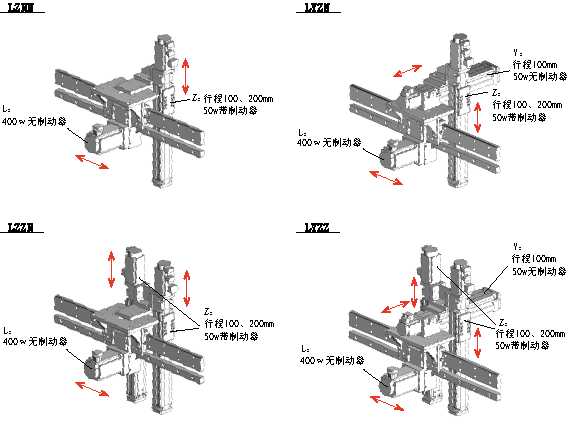
| 机器人类型 | LZNN | LZZN | LYZN | LYZZ | |
| 轴动作行程 | J1 | 600~12000mm | |||
| J2 | 100、200mm | 100mm | |||
| J3 | - | 100、200mm | |||
| J4 | - | - | - | 100、200mm | |
| 最大可搬运质量 | 5kg/Z*1 | ||||
| 最大速度 | J1 | 2m/s | |||
| J2 | 500mm/s | ||||
| J3 | - | 500mm/s | |||
| J4 | - | - | - | 500mm/s | |
| 重复定位精度 | L:±0.05mm Y、Z:±0.02mm | ||||
| 制动器 | J2:带制动器 | J2、3:带制动器 | J3:带制动器 | J3、4:带制动器 | |
| 质量 | 7kg | 9kg | 10kg | 12kg | |
| 项目 | 规格 | ||||
|---|---|---|---|---|---|
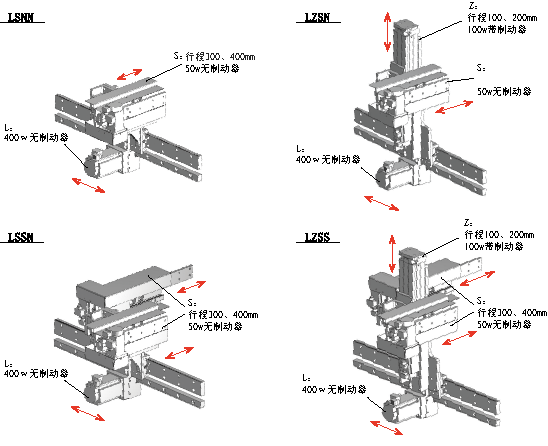
| 机器人类型 | LSNN | LSSN | LZSN | LZSS | |
| 轴动作行程 | J1 | 600~12000mm | |||
| J2 | 300、400mm | 100、200mm | |||
| J3 | - | 300、400mm | |||
| J4 | - | - | - | 300、400mm | |
| 最大可搬运质量 | 3kg/S (S轴400mm时为2kg/S) *1 | ||||
| 最大速度 | J1 | 2m/s | |||
| J2 | 1000mm/s | 500mm/s | |||
| J3 | - | 1000mm/s | |||
| J4 | - | - | - | 1000mm/s | |
| 重复定位精度 | L、S:±0.05mm Z:±0.02mm | ||||
| 制动器 | - | J2:带制动器 | |||
| 质量 | 9kg | 12kg | 13kg | 16kg | |
*1 请在“可搬负载的允许范围(PDF:127KB)”中确认重心位置的范围。重心位置在允许范围外时,需要减少质量。
变化
变化如下所示。
未指定电缆支架的安装方向。
ID : 5610