
ID : 5605
构成机器人系统的器材
机器人系统的整体构成如下所示。
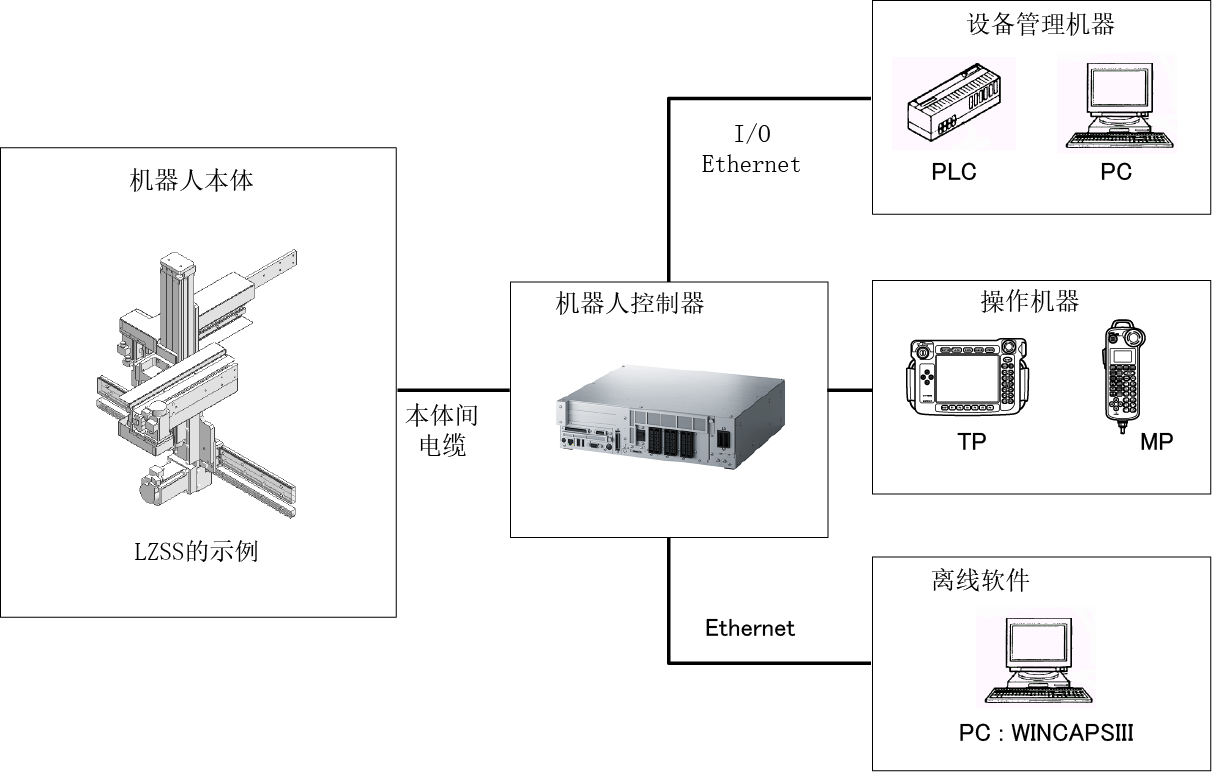
机器人本体
在工序间或设备间等搬运及放入取出工件的搬运机器人。
根据对应作业的轴构成,有8种机器人类型。详细内容请参照“机器人类型”。
由用户在法兰(臂前端)上安装夹治具等终端受动器。
机器人控制器
机器人控制器控制机器人本体的运行。根据通过设备管理机器发出的信号创建的程序运行机器人本体。另外,连接操作机器后,便可执行机器人的手动操作和各种设定等。
操作机器
进行机器人的手动操作或各种设定等操作的选件设备。
关于硬件、操作的详细内容,请参照“多功能教导器操作指南”和“小型教导器操作指南”。
TP:多功能教导器
为多功能操作机器,可进行机器人操作、教导、模式变更、程序启动、编程以及所有设定。使用简易操作盘功能,也可作为操作盘使用。
MP:小型教导器
为简易操作机器,可进行机器人操作、教导、模式变更、程序启动、部分设定。
离线软件
可进行控制器内项目数据的备份或程序的编辑、管理、动作仿真等。电装机器人系统使用的离线软件为“WINCAPSⅢ”。购买机器人系统时,同箱包装有免费的Trial版本。详细内容请参照“WINCAPSIII指南”。
设备管理机器
由用户管理设备的系统。电装机器人可连接设备管理机器和CC-Link、DeviceNet等各种网络。
ID : 5605