
ID : 5423
机器人夹治具设计的注意事项
设计机器人的夹治具时,请满足以下项目。
如果不遵守机器人夹治具设计的注意事项,则机器人本体的各紧固部位可能发生松动、晃动,引起错位,最严重时可能导致机器人的机械零部件及机器人控制器破损。
夹治具质量
请将夹治具、工具(包括工件)总质量的最大值设计在机器人最大可搬运质量以下。总质量还包括夹治具、工具中使用的配线、配管材料。
夹治具、工具总质量最大值(包括工件质量)≦最大可搬运质量(7kg)※1
※1:可搬运质量超过6kg时请按照法兰面向下±45°的姿势使用。
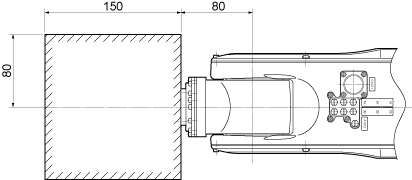
夹治具重心位置
在下图的范围内设计夹治具、工具(包括工件)的重心位置。
 |
J4、J5、J6旋转惯性力矩
请将夹治具、工具(包括工件)的J4、J5、J6旋转惯性力矩设计在机器人的最大容许惯性力矩以下。
夹治具、工具的J4、J5、J6旋转惯性力矩(包括工件质量)≦最大容许惯性力矩
| 可搬运设定 |
最大容许惯性力矩[kg・㎡] |
|
|---|---|---|
| [kg] | J4、J5周围 | J6周围 |
| ~1 | 0.059 | 0.009 |
| ~2 | 0.118 | 0.018 |
| ~3 | 0.177 | 0.027 |
| ~4 | 0.236 | 0.036 |
| ~5 | 0.295 | 0.045 |
| ~6 | 0.354 | 0.054 |
| ~7 | 0.413 | 0.063 |
安装机器人夹治具时的注意事项
不要在基准孔φ5H7处施加外力,如用销钉敲入等。否则会造成故障。
关于基准孔,请参照“将CALSET治具安装至第6轴的步骤”。
ID : 5423