
ID : 5261
在线监视器的准备
启动在计算机上编写的程序,上载到机器人控制器。
为了在计算机画面上模拟机器人动作,用多功能教导器置于锁机状态。
打开机械臂3D视图
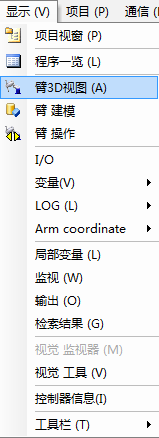
打开机械臂3D视图,以显示机器人的虚拟状态图像。
选择[显示(V)]-[机械臂3D视图(A)]后,将显示[机械臂 3D视图]视窗。
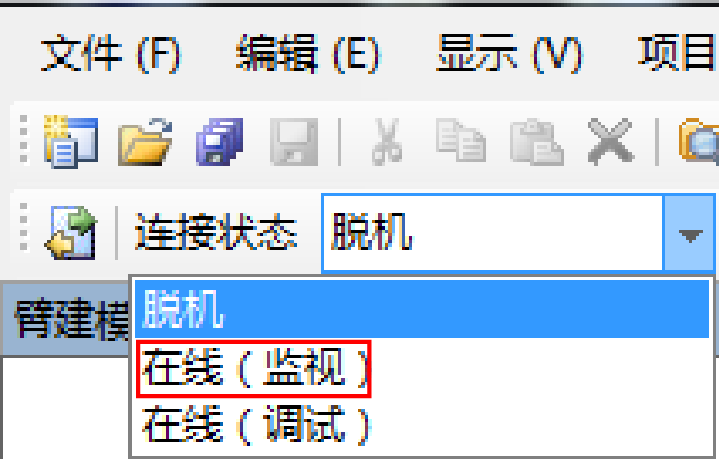
将WINCAPSIII设为监视模式
将WINCAPSIII的连接状态设为[在线(监视)]。
设定机器锁定状态
将机器人控制器设定为机器锁定状态。
进行该操作后,无需实际动作机器人,即可执行程序并设定虚拟状态。
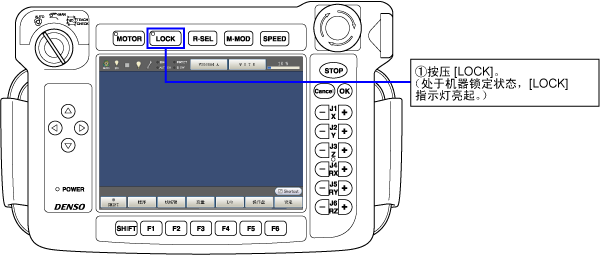
确认机器锁定时电机电源为切断状态。即,确认[MOTOR]灯熄灭。
机器锁定时,可限制I/O输出。关于详细内容,请参照“多功能教导器操作指南”中的“I/O辅助功能菜单的显示”。
状态栏的图标随I/O输出限制的状态变化。
 :无I/O输出限制
:无I/O输出限制  :有I/O输出限制
:有I/O输出限制
ID : 5261