
ID : 4887
伺服电机的选择知识
机器人等的伺服机构驱动设计中,就选择最佳伺服电机输出和减速比时所需的知识进行说明。
(1) 负荷驱动扭矩(T )的计算

| 符号 | 含义 | 单位 |
|---|---|---|
| 电机轴换算的总惯性力矩 | (Nms²) | |
| 电机轴角加速度 | (rad/s²) | |
| 电机使用转速 | (rpm) | |
| 制动常数(参照电机目录) | (Nm/rpm) | |
| 电机静摩擦扭矩(参照电机目录) | (Nm) | |
| 传动系统等的摩擦扭矩(电机轴换算) | (Nm) | |
| 动力保持扭矩(电机轴换算) | (Nm) | |
| 干涉扭矩、离心力、哥氏力等(电机轴换算) | (Nm) |
(2) 电机最大发生扭矩(TM)的计算(电机轴换算)
但是
| 符号 | 含义 | 单位 |
|---|---|---|
| 电机中流通的最大电流值 | (Ao·p) | |
| 扭矩常数(参照电机目录) | (Nm/Ao·p) |
或通过电机目录中记录的“瞬时最大扭矩”显示。
但是,MC8的驱动扭矩“T”设定在电机额定扭矩的2.5倍以内。
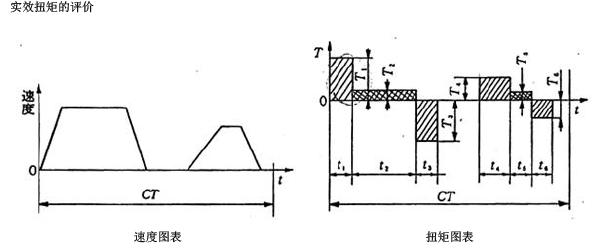
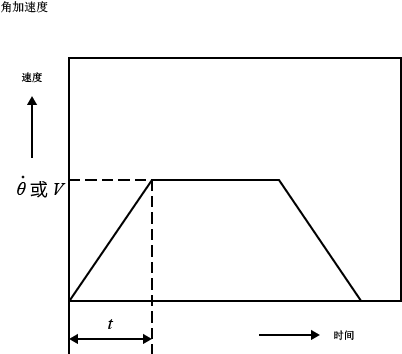
(3) 实效扭矩的计算和评价
按照下图所示模式动作时,通过下式计算单循环的实效扭矩(Tt)。
| 符号 | 含义 | 单位 |
|---|---|---|
| 驱动扭矩((1)公式的T) | (Nm) | |
| 减速扭矩(从(1)公式的T中减去摩擦扭矩) | (Nm) | |
| 摩擦扭矩+特殊扭矩 | (Nm) | |
| (秒) | ||
| 循环时间 | (秒) |
 |
通过电机单体进行的评价
Tt < TR(电机目录记录的额定扭矩)
但是,由于编码器电路的热限制(70℃),请在电机额定扭矩的80%以内使用。
超过电机额定扭矩的80%时,对编码器电路的温度进行测定、确认。
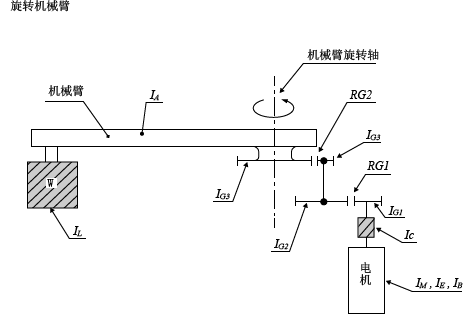
(4) 总惯性力矩(I )的计算(电机轴换算)
旋转机械臂时(下图)

| 符号 | 含义 | 单位 |
|---|---|---|
| 负荷W的机械臂旋转轴旋转惯性力矩 | (Nms²) | |
| 机械臂的机械臂旋转轴旋转惯性力矩 | (Nms²) | |
| 1档小齿轮的惯性力矩 | (Nms²) | |
| 1档齿轮的惯性力矩 | (Nms²) | |
| 2档小齿轮的惯性力矩 | (Nms²) | |
| 2档齿轮的惯性力矩 | (Nms²) | |
| 联轴器的惯性力矩 | (Nms²) | |
| 电机转子的惯性力矩 | (Nms²) | |
| 编码器的惯性力矩 | (Nms²) | |
| 内置制动器的惯性力矩 | (Nms²) | |
| 1档传动比 | (1/n) | |
| 2档传动比 | (1/n) |
 |
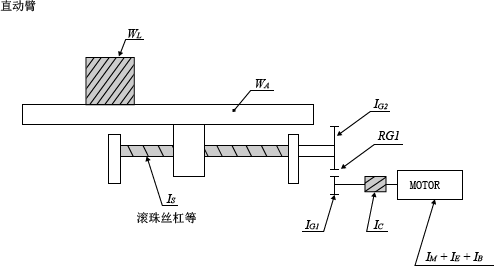
直动臂时(下图)
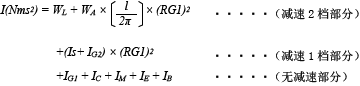
| 符号 | 含义 | 单位 |
|---|---|---|
| 负荷重量 | (kg) | |
| 机械臂的重量 | (kg) | |
| 滚珠丝杠的惯性力矩 | (Nms²) | |
| 滚珠丝杠的导程 | (m/rev.) |
 |
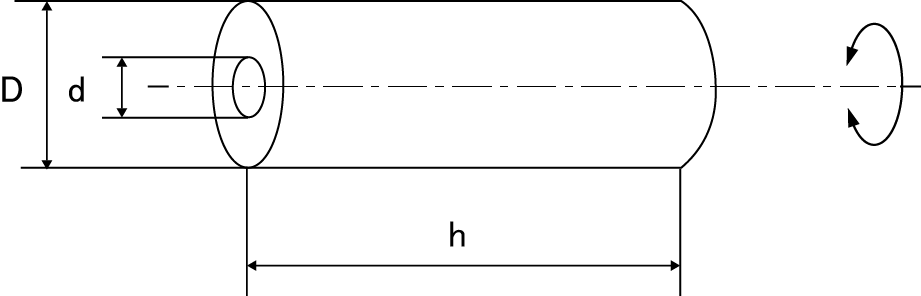
旋转体惯性力矩(I1)的计算

| 符号 | 含义 | 单位 |
|---|---|---|
| 外径 | (m) | |
| 内径 | (m) | |
| 厚度 | (m) | |
| 比重 | (kg/m³) |
以GD²表示惯性时,除以4×g。
旋转体
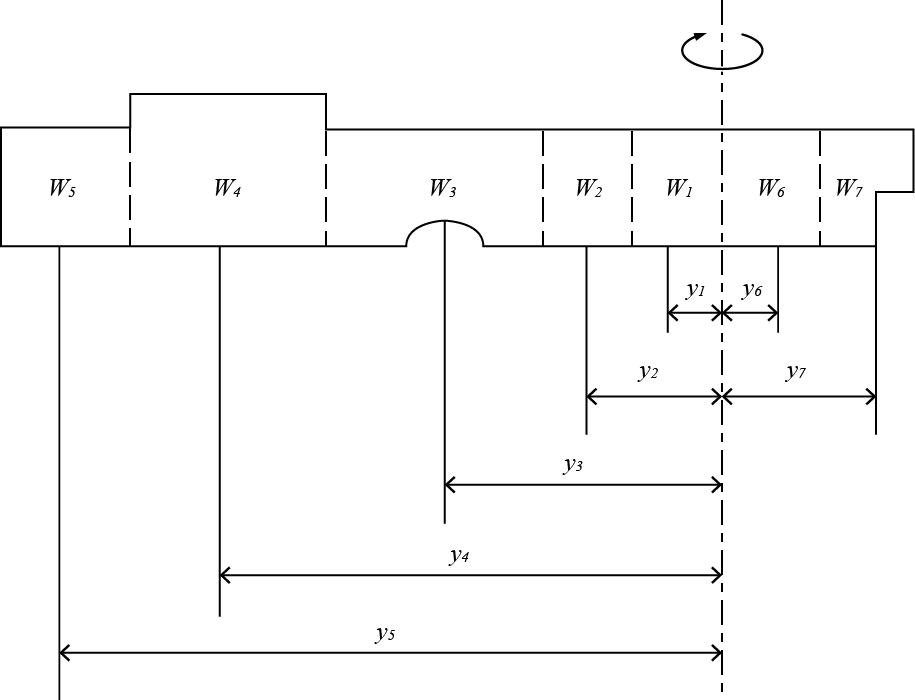
复杂形状物体惯性力矩(I2)的计算
由于复杂形状物体惯性力矩的计算无法公式化,因此将物体分割后计算各个分割部分的惯性力矩,然后得到的总和即为该物体的惯性力矩。
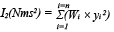
| 符号 | 含义 | 单位 |
|---|---|---|
| 分割部分的重量 | (kg) | |
| 旋转中心至分割部分中心的距离 | (m) |
复杂形状物体
(5) 电机轴角速度(ω)的计算
旋转机械臂时

直线运行时

| 符号 | 含义 | 单位 |
|---|---|---|
| 加速时间 | (秒) | |
| 机械臂旋转速度 | (°/s) | |
| 直线速度 | (m/s) | |
| 总减速比 | (1/n) | |
| 滚珠丝杠、齿条小齿轮···导程 | (m/圈) |
 |
(6) 传动系统等的摩擦扭矩(TFD)
滑动部位与密封、减速机等的摩擦扭矩除以减速比后得出的值即为电机轴换算的摩擦扭矩。由于减速前的传动机构的摩擦扭矩会直接施加到电机中,因此请务必注意。
(7) 重力保持扭矩(Tg)
需要保持重力时,保持的物体重量除以传动比后得出的值即为电机轴换算的重力扭矩。但是,使用气缸和平衡锤维持重力平衡时,虽然重力保持扭矩为“0”,但是请注意气缸滑动阻力和惯性力矩的增加情况。
(8) 特殊负荷扭矩(Ts)
自由度超过“2”时,通过其它轴的动作可能会受到干涉扭矩、离心力和哥氏力。根据机械的构成和动作速度计算这些力,然后除以传动比后得出的值即为电机轴换算的扭矩。
干涉扭矩示例
- 在2关节机械臂中,第2机械臂的驱动扭矩(TJ2)会加到第1机械臂中。(下图 干涉扭矩(a))
- 直线运动和旋转轴的组合中,直线轴的加速度(α)也会加到旋转轴的偏移负荷(W)中,产生与偏移距离(r)成比例的旋转轴旋转扭矩(Tr)。(下图 干涉扭矩(b))

 |
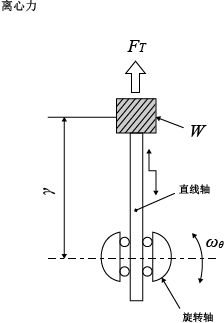
离心力(FT)示例
旋转轴上的物体(W)由中心向外产生与旋转轴角速度(ωθ)的2次方和旋转半径(r)成比例的离心力(FT)。

下图中直线轴支撑离心力。
 |
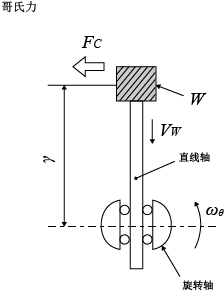
哥氏力(Fc)示例
旋转轴上的物体(W)以VW 速度动作时,物体(W)在与VW呈直角的方向,产生与W、旋转轴角速度(ωθ)和速度(VW)的2倍成比例的哥氏力(Fc)。
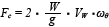
下图中,旋转轴产生与哥氏力(Fc)和半径(r)相乘后的扭矩,另外,直线轴产生与哥氏力(Fc)和滑动部位摩擦系数相乘后的摩擦阻力。
 |
ID : 4887