
ID : 4766
机器人本体的固定方法
1
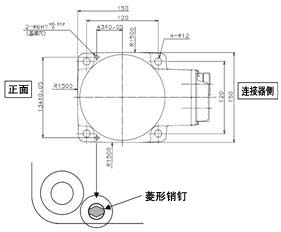
按照下图尺寸,在安装台的机器人固定位置钻4个螺栓孔和2个定位销钉孔。
|
机器人固定用孔(4处) |
M10、深度20mm以上 | |
|---|---|---|
|
定位销钉用孔(2处) |
菱形销钉用 | φ4H7、深度10mm以上 |
| 带内螺纹的定位销钉用 | φ6H7、深度10mm以上 | |
2
将菱形销钉打入菱形销钉用孔[HS/HSS用:φ4H7]。此时,按照下图所示方向打入菱形销钉。
3
将带内螺纹的定位销钉打入孔[HS/HSS用:φ6H7]。
必须打入定位销钉。维护作业等时,可将由机器人本体的装拆或振动造成的错位控制在最小限度。
4
将机器人本体置于固定位置。
5
通过4根本体固定螺栓和平垫圈固定机器人。
- 本体固定螺栓:HS/HSS用 M10×30mm(强度区分12.9)
- 安装扭矩:HS/HSS用 70±14Nm
本体固定螺栓的位置
|
(HS/HSS) |
ID : 4766