
ID : 3308
编程示例
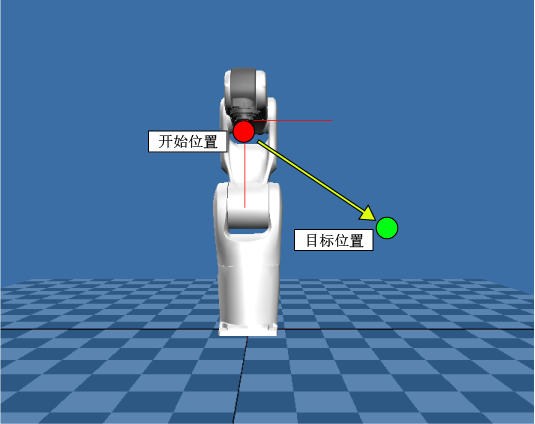
以下是通过Command-Slave功能,控制机器人的编程的一个示例。
作为例子,创建一个程序,通过PTP控制移动到6轴机器人的绝对位置(从开始位置到目标位置)。
1
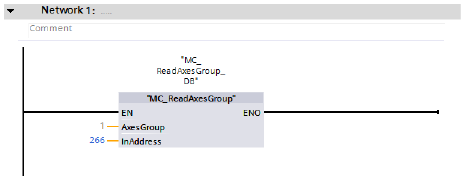
在程序的开始位置配置"MC_ReadAxesGroup"。
 |
2
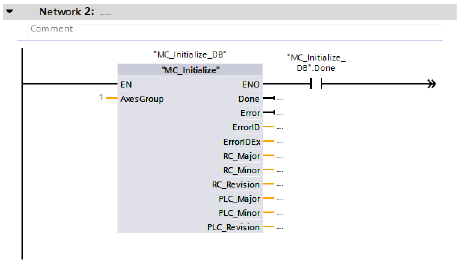
配置"MC_Initialize"。
如下图所示,在后面配置"常闭"后,机器人控制器和PLC的通信不能正常进行时,可停止以后的处理。
 |
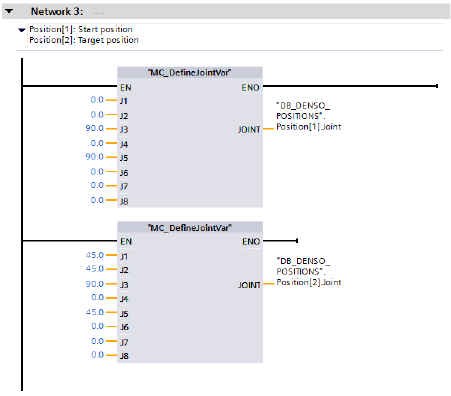
3
配置"MC_DefineJointVar",指定开始位置和目标位置。
已指定开始位置和目标位置时,请移动至STEP4。
 |
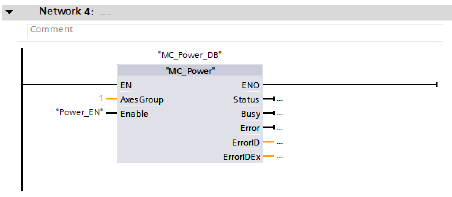
4
为了打开机器人的电机,配置"MC_Power"。
请为输入参数"Enable"配置任意全局变量。
 |
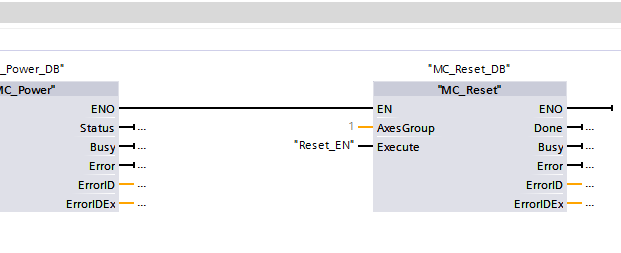
5
防备发生错误,在"MC_Power"之后配置"MC_Reset"。
请为输入参数"Execute"配置任意全局变量。
 |
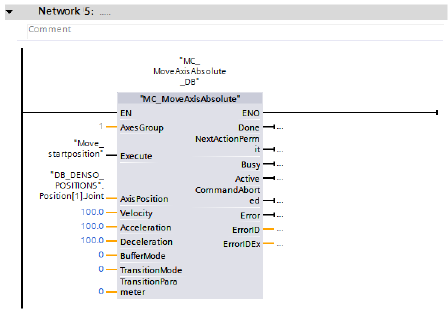
6
为了将机器人移动到开始位置,配置"MC_MoveAxisAbsolute"。
请为输入参数"Execute"配置任意全局变量。
请为输入参数"AxisPosition"配置指定的开始位置。
 |
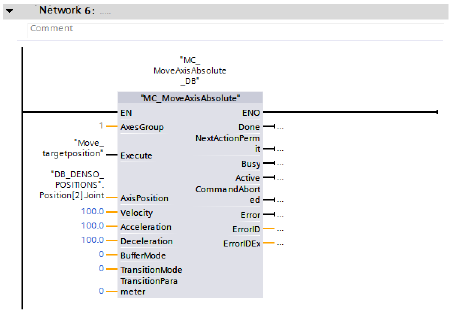
7
为了将机器人移动到目标位置,配置"MC_MoveAxisAbsolute"。
请为输入参数"Execute"配置任意全局变量。
请为输入参数"AxisPosition"配置指定的目标位置。
 |
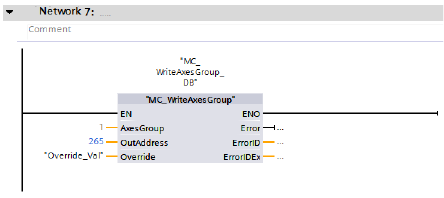
8
在程序的最后配置"MC_WriteAxesGroup"。
请为输入参数"Override"配置任意全局变量。
 |
至此,程序创建完成。
ID : 3308