
ID : 3216
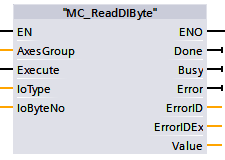
MC_ReadDIByte
获取机器人控制器的I/O输入信号的状态。(Byte)
| 图形显示 | FB编号 | FB范畴 |
|---|---|---|
 |
FB2138 | 非动作 |
输入参数
| 参数名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | Int | 1以上 | 1 | 不可以 |
|
||||
| Execute | Bool |
|
False | 不可以 |
|
||||
| IoType | Int | 0.1 | 0 | 不可以 |
|
||||
| IoByteNo | Int |
|
0 | 不可以 |
|
||||
输出参数
| 参数名 | 数据型 / 说明 |
|---|---|
| Done | Bool |
|
|
| Busy | Bool |
|
|
| Error | Bool |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
|
| Value | Byte |
|
功能说明
获取机器人控制器的I/O输入信号的状态。
下面是Byte编号和机器人控制器的端口编号的对应表。
- Hand I/O
IoByteNo 机器人控制器 端口编号 机器人控制器 I/O名称 0 48 夹治具输入 49 夹治具输入 50 夹治具输入 51 夹治具输入 52 夹治具输入 53 夹治具输入 54 夹治具输入 55 夹治具输入 - Mini I/O
IoByteNo 机器人控制器 端口编号 机器人控制器 I/O名称 0 0 通用输入 1 通用输入 2 通用输入 3 通用输入 4 通用输入 5 通用输入 6 通用输入 7 通用输入 1 8 通用输入 9 通用输入 10 通用输入 11 通用输入 12 通用输入 13 通用输入 14 通用输入 15 通用输入
注意事项
-
ID : 3216