文字大小
<< 向前 下一页 >>
ID : 2019
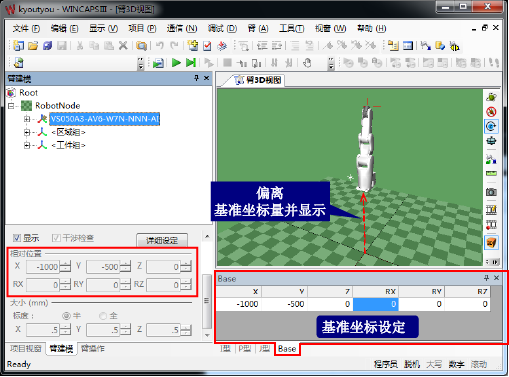
设定与世界坐标系相对应的基准坐标。
以往的机器人底座为世界坐标的原点,偏离基准坐标量的位置为新的机器人底座。
操作路径:[菜单] - [显示] - [机械臂坐标系] - [底座]
协调功能
 HOME
HOME