
ID : 1938
基准坐标系与工件坐标系
6轴机器人的基础坐标系
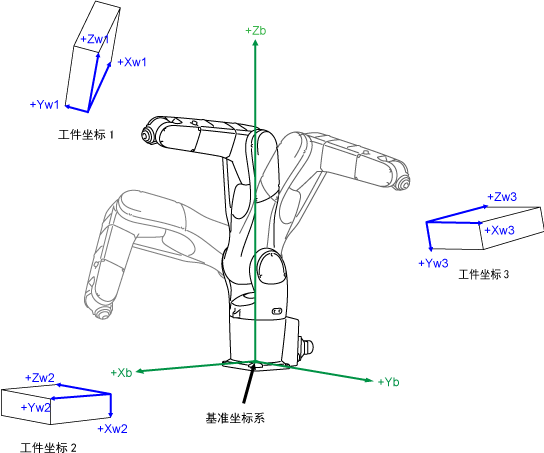
基础坐标系是指以机器人的基准中心为原点的三维直角坐标。基础坐标系的X轴表示为Xb、Y轴为Yb、Z轴为Zb。
6轴机器人的工件坐标系
工件坐标系,是在机器人欲要操作的目标对象工件的每个作业空间上被定义的三维直角坐标。可在任意位置定义原点。如下图所示,其原点为目标对象工件的包络长方体的一个顶点。工件坐标是用相对于基准坐标的坐标原点位置(X,Y,Z)与围绕基准坐标的X轴、Y轴、Z轴的旋转角度(RX,RY,RZ)来表示。
最多可注册7类,附带工件坐标编号1~7。
工件坐标未定义的情况下是基础坐标。
ID : 1938