
ID : 1498
动作相关参数
程序最高速度
设定测点数据内的最高速度。 输入范围:20~100(%) 初始值:100
该参数在装置调整时不变更测点数据,且在需要降低所有测点数据的移动速度等时有效。 •
夹持速度
设定进行加减速绝对位置(加减速相对位置)移动、夹持动作时有效夹持范围内的速度。
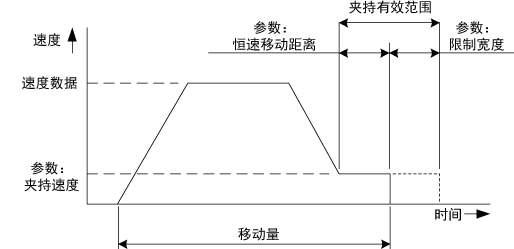
输入范围:20~100(%) 初始值:20(%)
注)将夹持速度设定为大于最高速度的值时,最高速度即为夹持速度。
恒速移动距离
设定加减速绝对位置(相对位置)移动、夹持动作时的恒速移动距离。 到达距目标位置恒速移动距离位置后变为夹持速度。
输入范围:0.01~99.99(0.01mm单位) 初始值:2(mm)
限制宽度
设定加减速绝对位置(相对位置)移动、夹持动作时的恒速移动限制宽度。 仅在距目标位置限制幅度的范围内,以夹持速度移动。 超出夹持有效范围时,在移动量+限制宽度范围内停止,在HOLD信号OFF的状态下INPOS信号ON。
输入范围:0.01~99.99(0.01mm单位) 初始值:因执行器类型而异
注)即使在恒速移动距离内,仍然执行夹持动作。
位于限制宽度内时,如果执行加减速绝对位置移动、夹持动作,则仅在最终位置动作时不执行夹持动作。请将限制宽度设定为最小值,以防止此情况发生。
+软件限制
设定+侧的可运行范围。 输入范围:0~999.9(0.1mm单位) 初始值 :因执行器类型而异。 将原点复位方向设定在开侧时,闭侧为+方向。 将原点复位方向设定在闭侧时,开侧为+方向。 设定测点数据后,输入动作指令时应防止移动至软件限制范围外。 使用软件限制范围外的测点数据指定动作时,机器人控制器发生错误并停止。
-软件限制
设定-侧的可运行范围。 输入范围:-999.9~0(0.1mm单位) 初始值 :因执行器类型而异。 将原点复位方向设定在开侧时,闭侧为+方向。 将原点复位方向设定在闭侧时,开侧为+方向。 设定测点数据后,输入动作指令时应防止移动至软件限制范围外。使用软件限制范围外的测点数据指定动作时,机器人控制器发生错误并停止。
行程
设定执行器的行程。 初始值:因执行器类型而异。 输入范围:0~999.9(0.1mm单位) 初始值因执行器类型而异。
定位完成距离
向指定的点移动时,在到达指定距离位置后移动完成的INPOS信号ON。 需要延长系统的工作时间时,增大参数的值。 输入范围:0.01~655.35(0.01mm单位) 初始值:因执行器类型而异。
ID : 1498