
ID : 2483
Robot Speed Monitoring (RSM)
機能
ロボット上の監視点の速度が、指定速度以下であるかを監視する機能です。
指定速度を超えると、SS1機能が働き、ロボットを停止しモータ電源をOFFします。
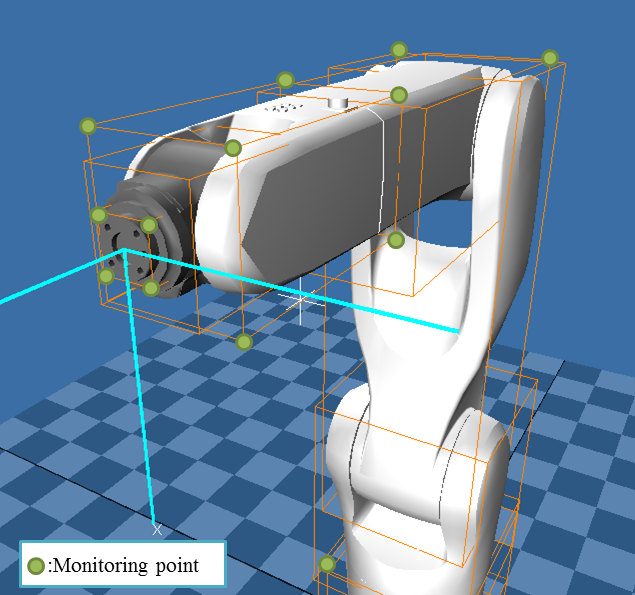
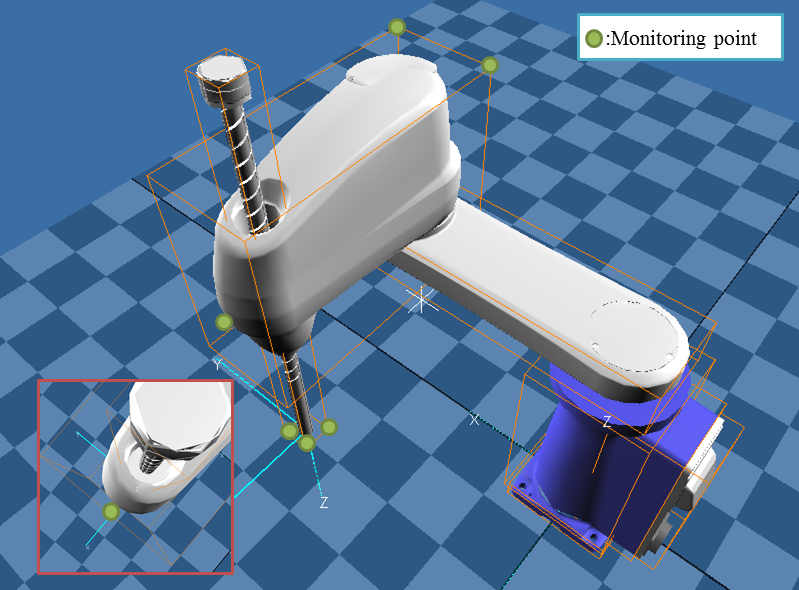
監視点は下記の場所です。
- フランジ中心とTCP
入力信号の「ツール番号入力*」で指定したツール番号を使用
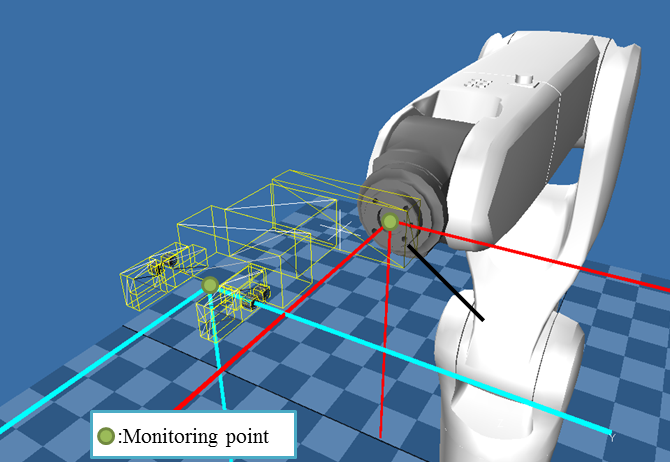
- ロボットアーム上の点
使用条件
| 入力信号 | RSM *入力(自動モードのみ有効)、監視無効入力(手動モードのみ有効)、ツール番号入力* |
|---|---|
| 出力信号 | RSM *出力 |
| 監視対象 | ロボット、付加軸 |
| 監視範囲設定 | なし |
| Reaction time | 50ms(Max) |
| Process Safety Time (PST) | 100ms |
| 実行モード | 自動モード、手動モード |
| 機能の開始タイミング |
|
注1:監視無効入力を使用する場合はセーフティパラメータの「15:監視無効入力設定」を「1:有効」にする必要があります。詳細は「監視無効入力」を参照してください。
使用方法
監視速度の指定方法
自動モードでは、下表のMotion I/O入力により、監視速度を指定します。
複数の信号をOFFした場合は、その中で最低の速度設定が選択されます。
| 信号名 | 内容 |
|---|---|
| RSM1入力 | 監視速度を125mm/sにする |
| RSM2入力 | 監視速度を250mm/sにする |
| RSM3入力 | 監視速度を500mm/sにする |
ツール番号の指定方法
Motion I/O入力の「ツール番号入力*」でツール番号を指定します。この場合、「ツール番号入力*」の4つを2進数とみなして、ひとつのツール番号を指定します。
例:TOOL1を指定する場合、「ツール番号入力0」をONし、「ツール番号入力1」~「ツール番号入力3」をOFFする。
リンク情報の設定
RC8シリーズロボットコントローラは、手動動作またはティーチチェック動作において、駆動しているロボット軸の動作速度を常時監視し、250mm/sec以下に制限します。
ロボット軸と付加軸のリンク状態を設定することにより、動作している軸の速度の和を常時監視し、250mm/sec以下に制限することができます。
詳細は「リンク情報設定」を参照してください。
ロボットと各付加軸が独立している場合
ロボットと付加軸は各々別の監視対象になります。付加軸はリンク情報に従い監視します。
ロボットと付加軸は独立しているが、2軸以上の付加軸が組合せてある場合
ロボットと付加軸は各々別の監視対象になります。付加軸は、各軸の合成速度を監視します。
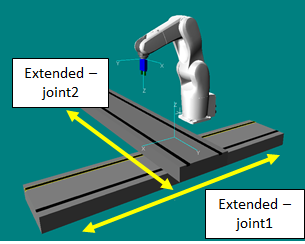
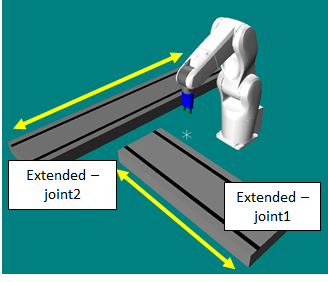
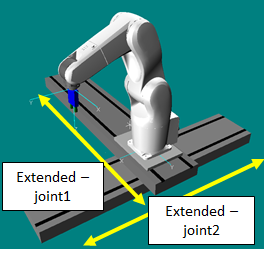
ロボットが付加軸上に設置されている場合
ロボットの監視点での、付加軸とロボットの合成速度を監視します。
ID : 2483