
ID : 7009
指令输入支援功能
概要
自动输入部分指令的功能。可一次性输入所需的参数等,简化了程序输入。仅可在编辑模式下可使用。
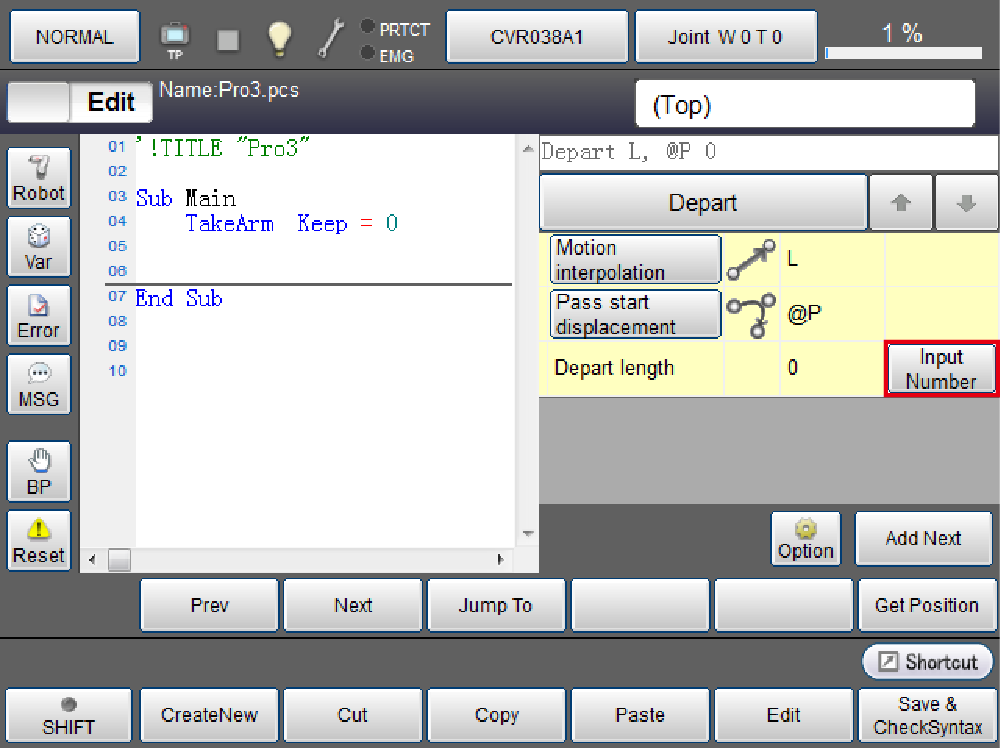
指令输入画面
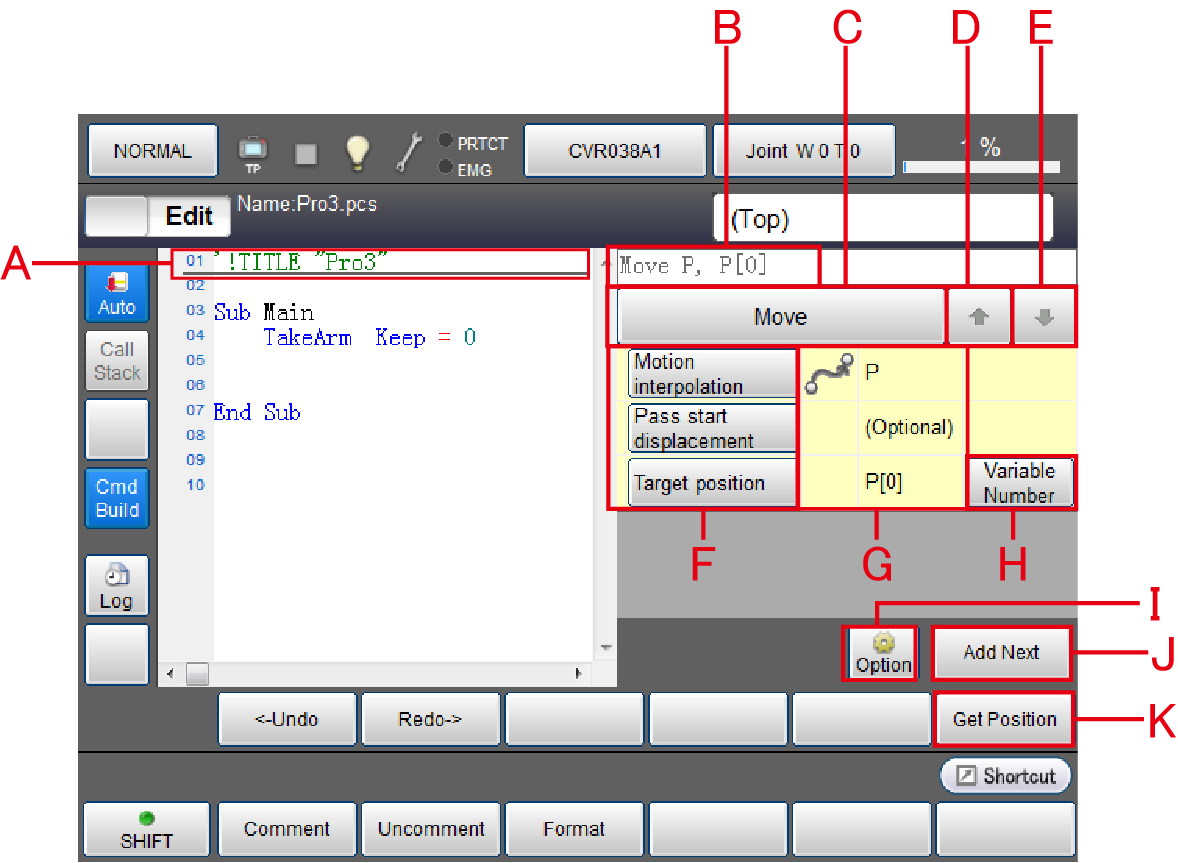
| 符号 | 项目 | 说明 |
|---|---|---|
| A | 追加指令光标 | 显示追加指令的行。可通过触摸画面、上下键进行移动。 |
| B | 指令字符串显示领域 | 通过字符串显示当前设定的指令和参数。 |
| C | 指令选择按钮 | 将显示切换至指令列表画面。 |
| D | 上一页按钮 | 显示指令列表的上一页。 |
| E | 下一页按钮 | 显示指令列表的下一页。 |
| F | 参数按钮 | 按压各参数按钮后,将显示切换至参数选择画面。 |
| G | 参数值 | 显示当前设定的参数值。 |
| H | 参数值设定按钮 | 在参数值中指定任意值时显示。显示数字键后,如果输入任意值后按下[OK]按钮,则该值确定。按钮的种类有以下2种。
|
| I | 选项按钮 | 表示用Approach、Move指令执行[追加行]时的选项。从以下3项选择,按[OK]按钮。
|
| J | 追加行按钮 | 将当前设定的指令和参数的字符串插入至追加指令光标的位置。 |
| K | 获取位置 |
获取机器人当前位置的坐标。(*1) |
*1:可获取到变量中,改写立即数。
- 使用变量时
在光标所在行使用了全局变量的P型、J型、T型变量时,将值获取到变量。
但是,在P型、J型、T型的索引中使用了变量、函数、宏定义时,不能获取位置。Move P, P[0]Move P, P[aaa] '不可获取位置
- 使用立即数时
描述了P型、J型、T型立即数时,将该值改写为当前位置的值。
但是,在P型、J型、T型的元素中使用了变量、函数、宏定义时,不能获取位置。Move P, P( 446.7207, 275.725, 329.036, 180, -0.0122849, -148.3163, 5 )Move P, P( aaa, 275.725, 329.036, 180, -0.0122849, -148.3163, 5 ) '不可获取位置
步骤
按照以下步骤使用指令输入支援功能。
- 选择指令。
- 选择设定的参数并确定值。
- 插入指令。
此处以在程序的第7行输入“Depart L, @P 50”为例进行说明。
1
按压[F1 程序]-选择编辑的程序文件-[F5 编辑]-[SHIFT]后,选择[指令编译器]。
显示“指令输入画面”。
2
设定插入指令的位置。使用触摸画面、上下键、将指令追加光标移至第6行。
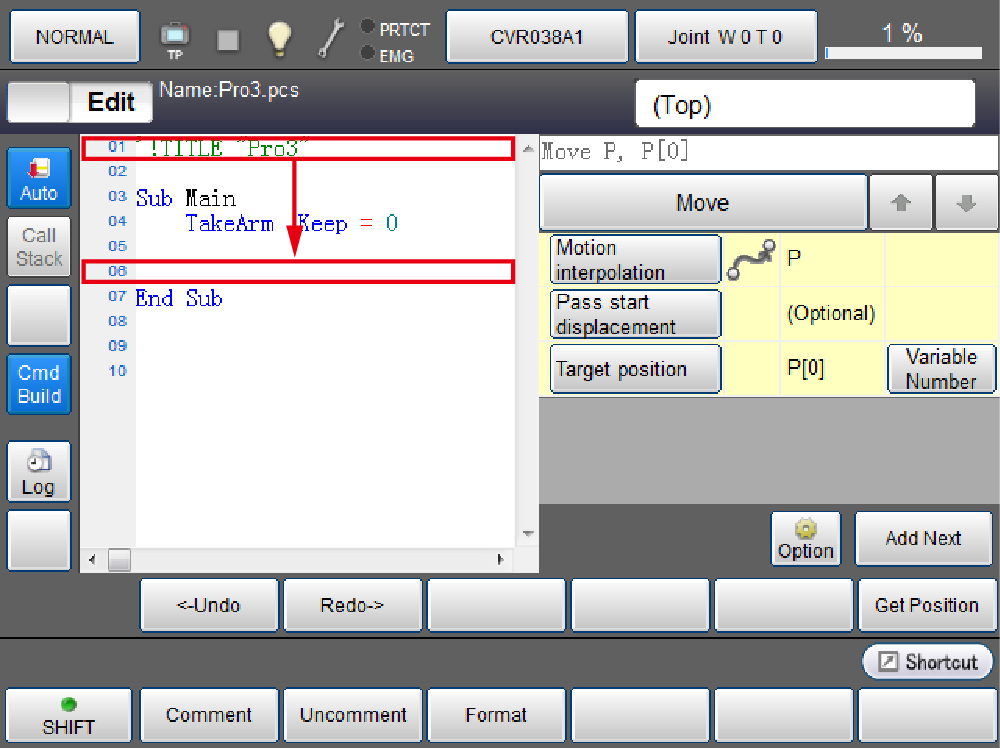
追加指令光标移至第6行。
3
按压“指令选择”按钮。
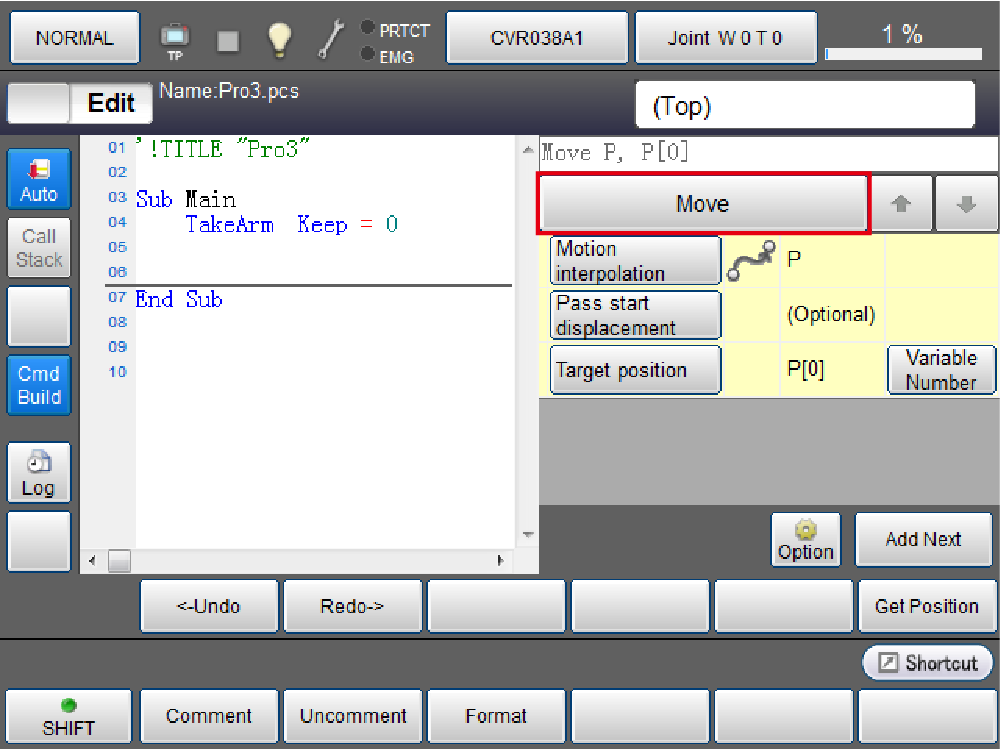
显示指令列表。
4
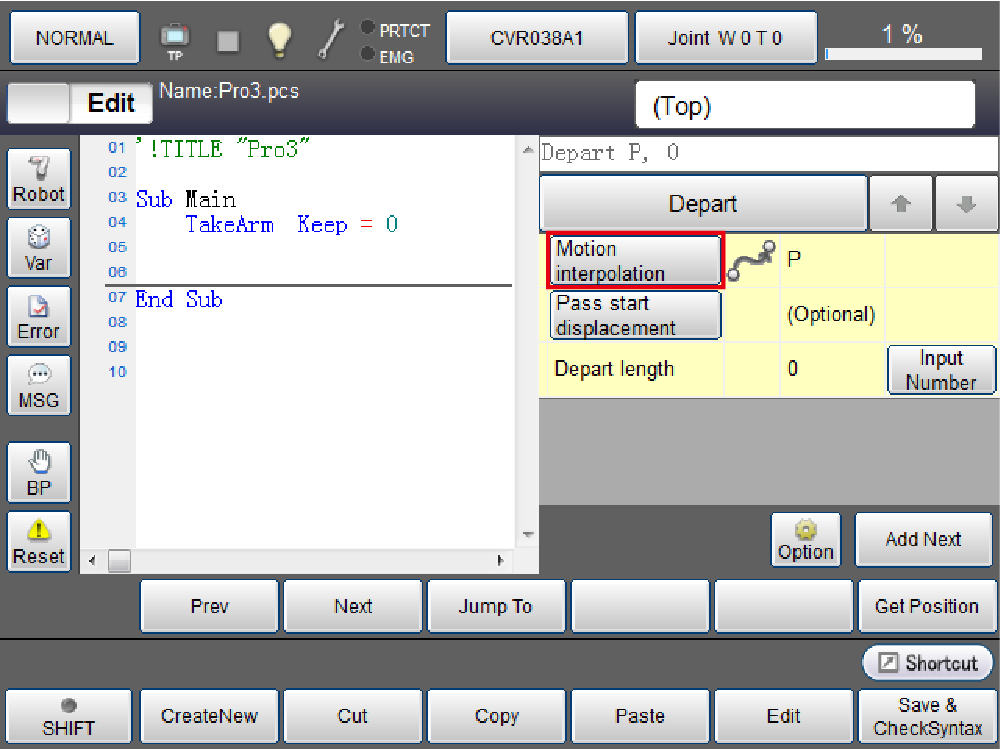
从指令列表中选择“Depart”。
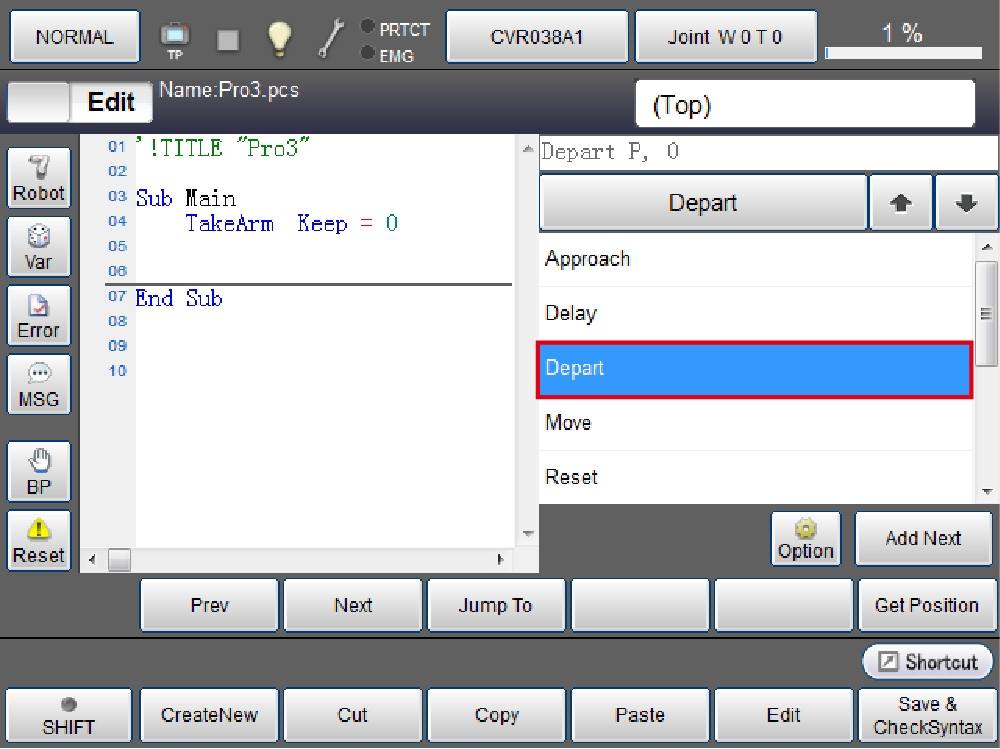
选择了指令“Depart”。
5
设定动作插补。按压“动作插补”按钮。
显示动作插补列表。
6
从动作插补列表中选择“L”。
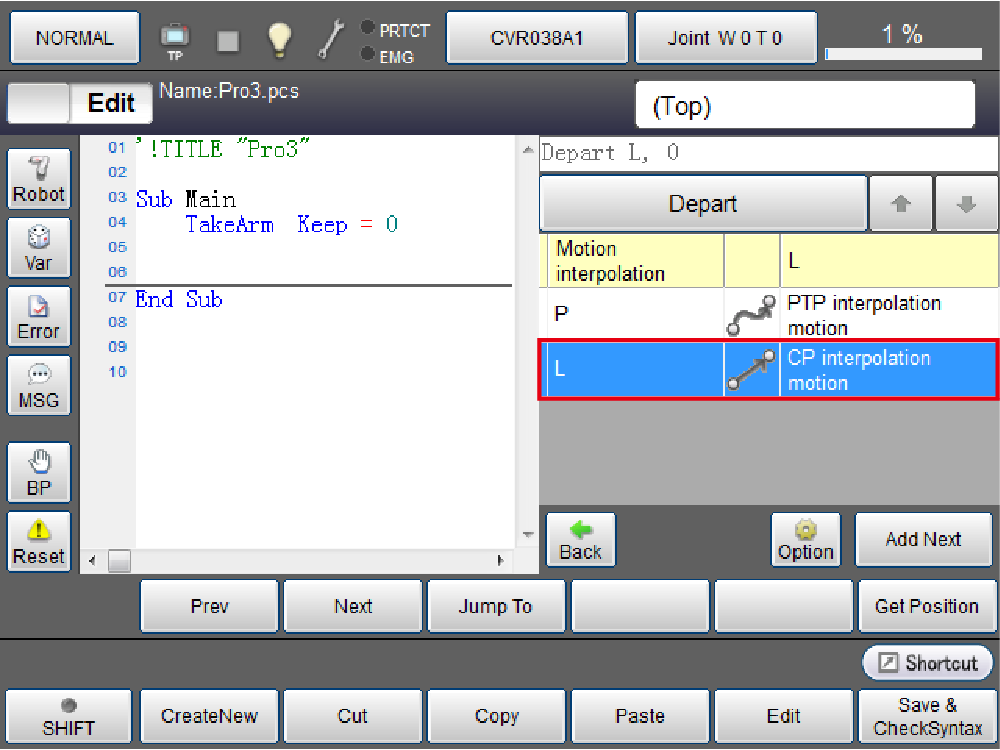
设定了动作插补。
7
设定通过起始位移量。按压“通过起始位移量”按钮。
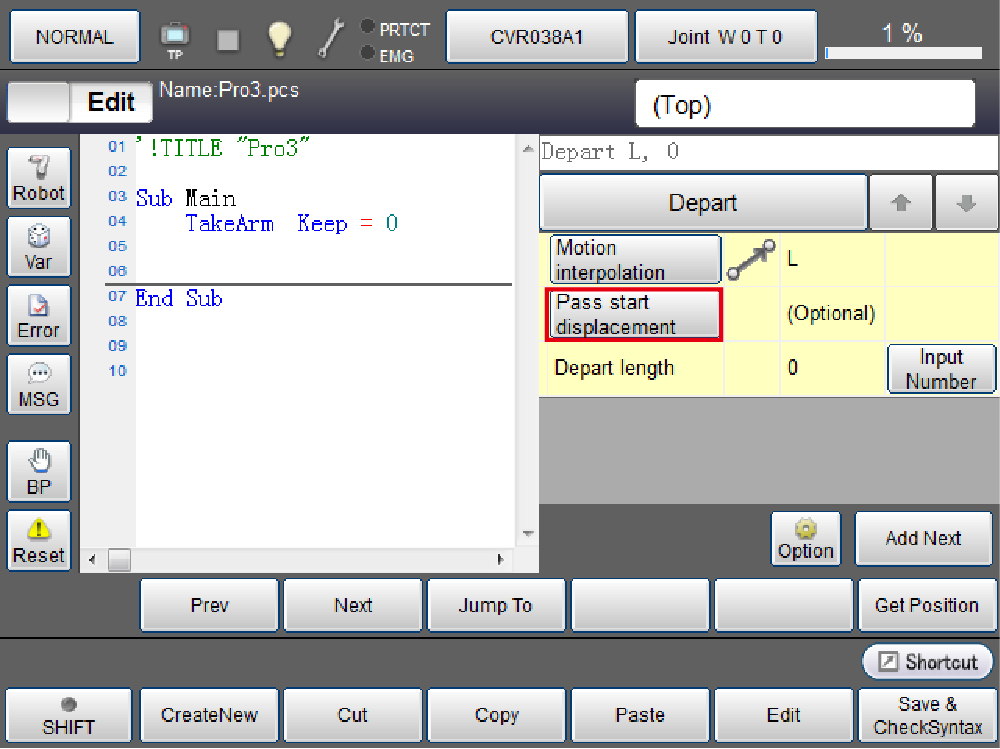
显示通过起始位移量列表。
8
从通过起始位移量列表中选择“@P”。
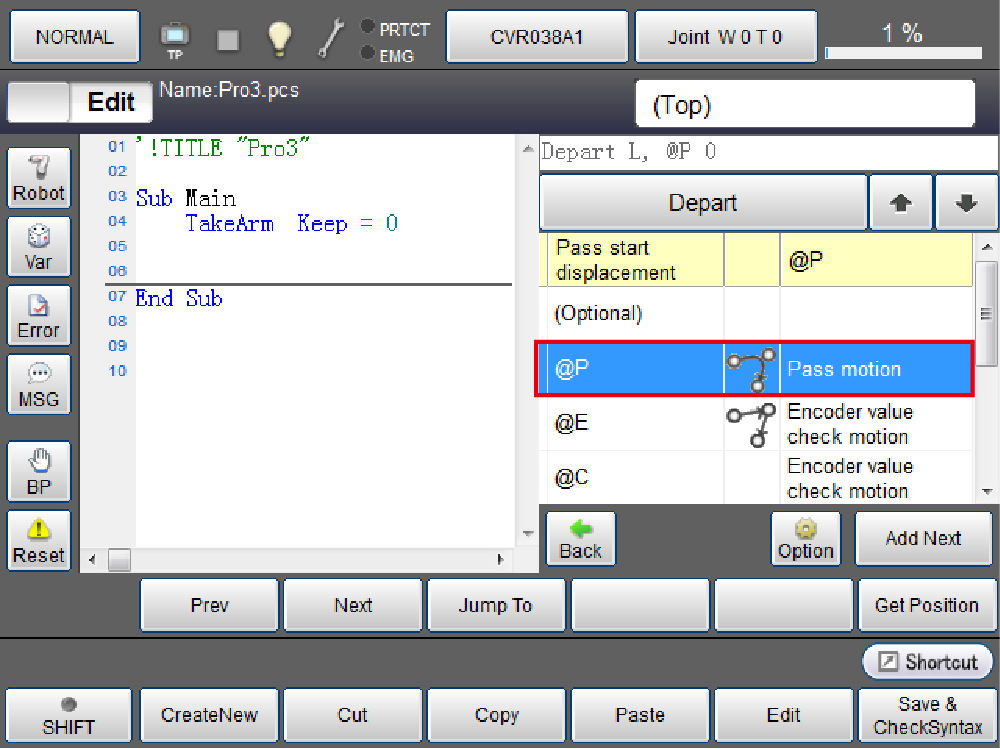
设定了通过起始位移量。
9
设定离开长度。按压离开长度项目的“数值输入”按钮。
显示数字键。
10
输入“50”后按压[OK]。
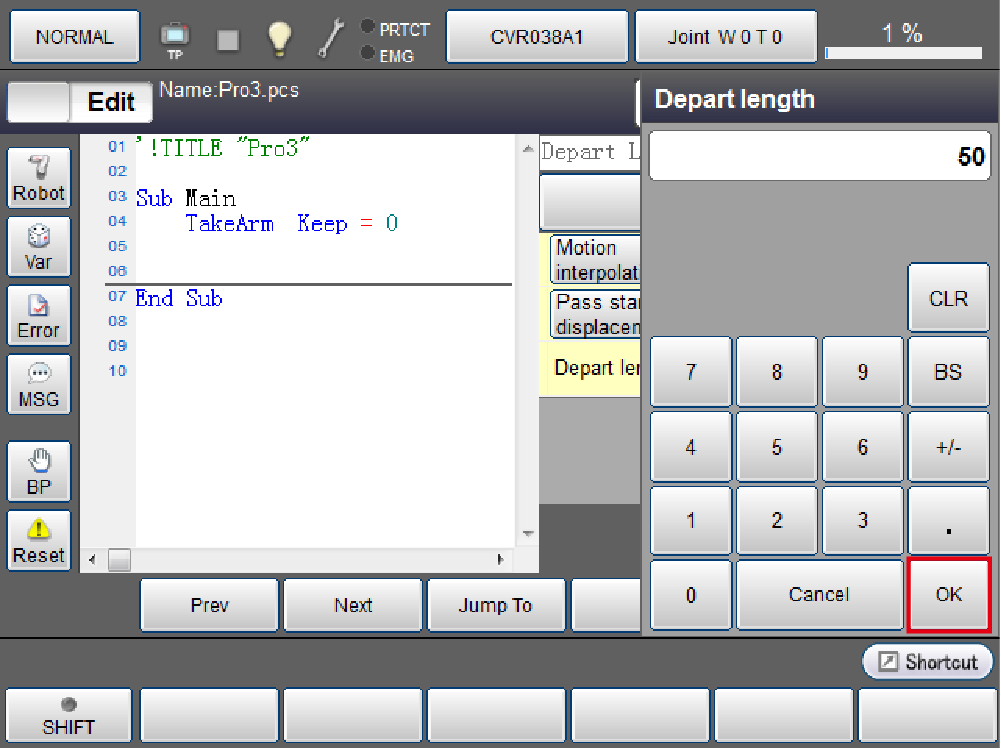
设定了离开长度。
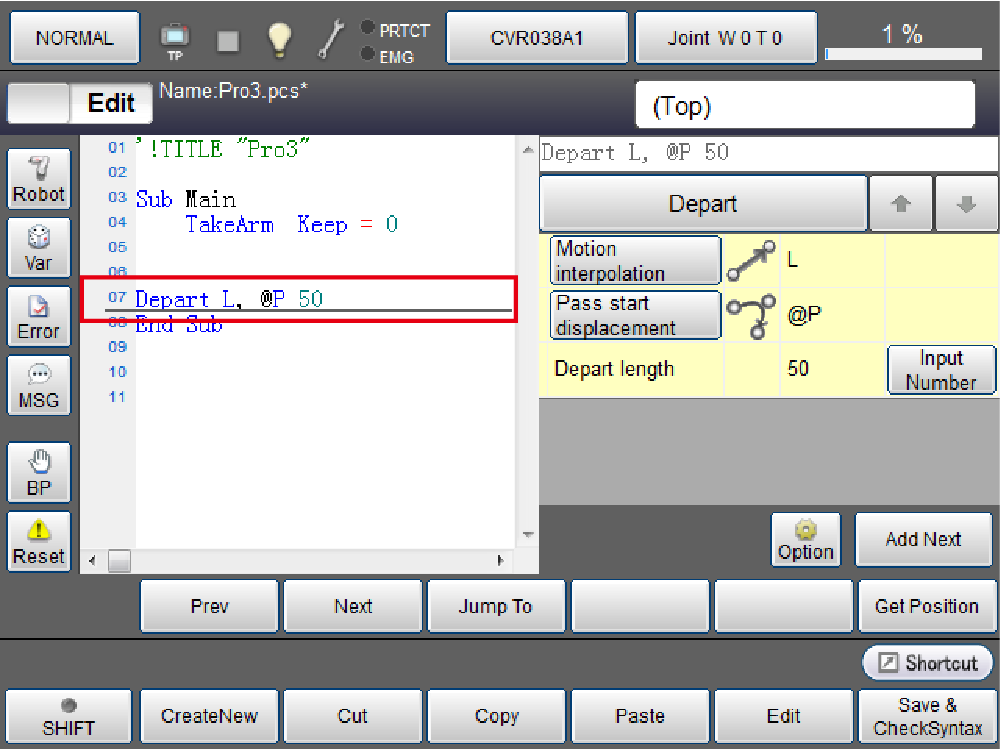
11
插入指令。按压“追加行”按钮。
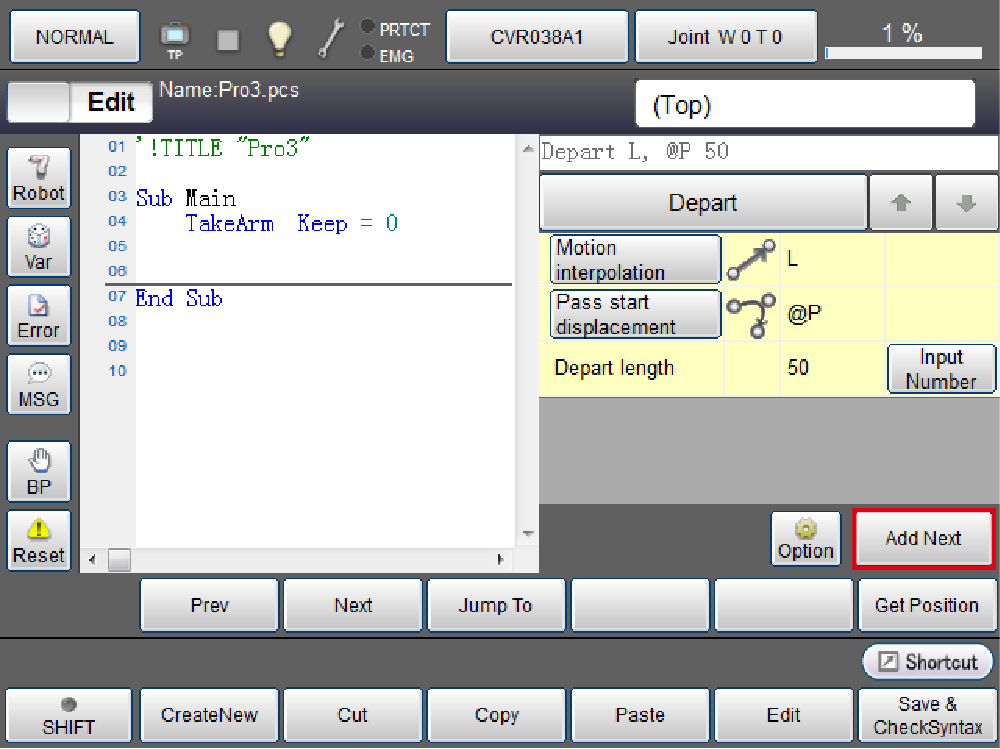
在第7行插入指令。
ID : 7009