
ID : 7007
工具定义的使用示例
指定Changetool 0后,工具定义解除,变为机械界面坐标(TOOL0)。
TakeArm指令将自动执行Changetool 0。
程序示例
表示指定了工具定义后解除的程序示例。工具1置于P1,工具2置于P2。
|
工具1
工具2
程序说明
①定义、TakeArm
在程序示例中,首先作为工具定义以TOOL1定义夹治具1、以TOOL2定义夹治具2。
之后,通过执行TakeArm语句,自动指定TOOL0,因此,机器人首先通过以法兰面为基准的动作,移动至P1(工具1放置的位置)。
②安装夹治具1
通过Set IO [104]安装工具1,在Depart P, 200处偏离P1,通过ChangeTool 1将工具坐标变更为TOOL1。
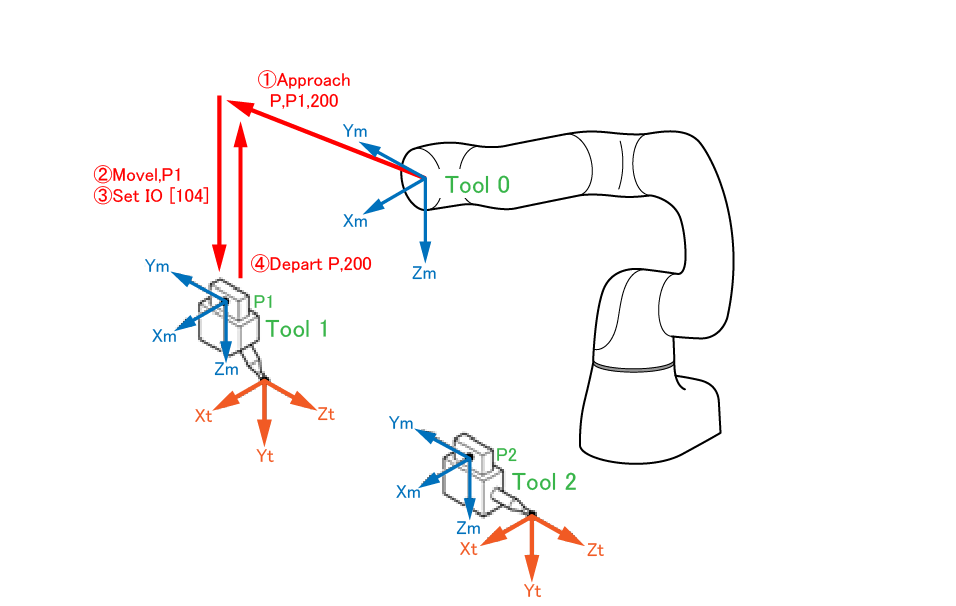
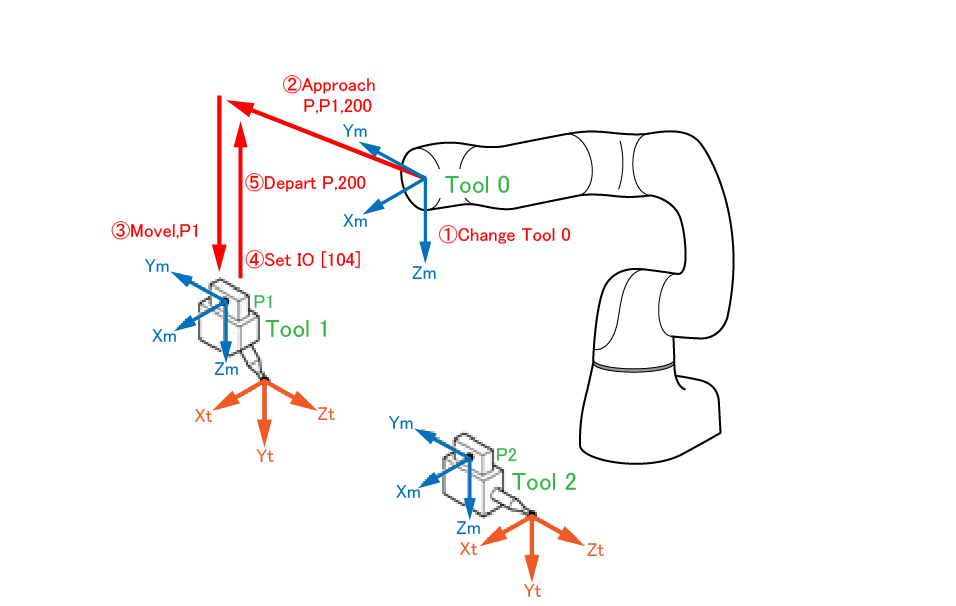
释放③工具1
将工具1更换为工具2时,必须释放当前的工具1。
通过ChangeTool 0切换为机械界面坐标后,移动到P1,释放工具1并放置在P1。
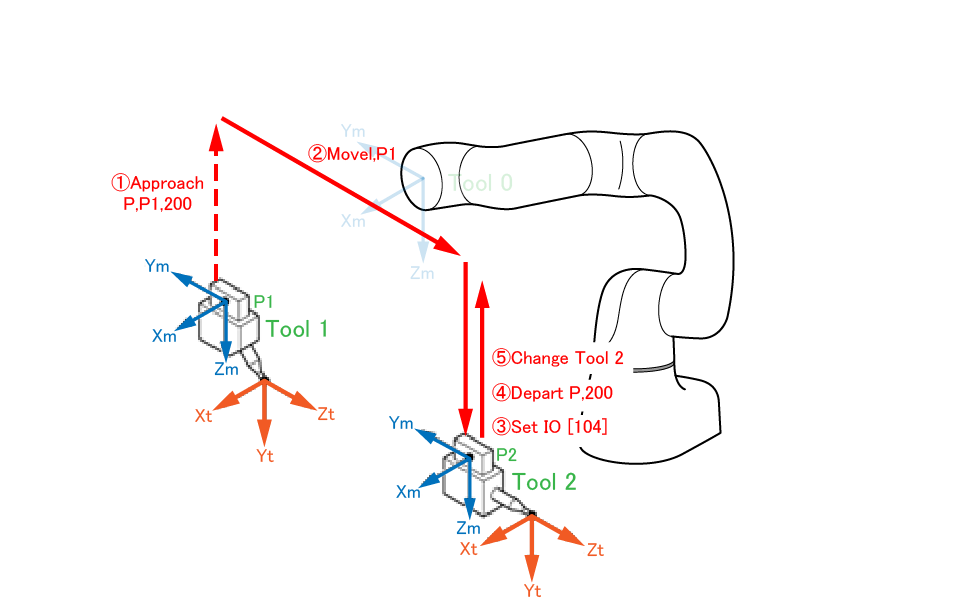
④安装工具2
在机械界面坐标状态下向P2移动,安装工具2。在Depart P, 200处离开P2后,将工具坐标变更为TOOL2。
ID : 7007