
ID : 6995
形态组合
COBOTTA对于工具前端的1个位置和姿势(X、Y、Z、RX、RY、RZ),在臂、肘、手腕上可以采取不同的形态。
如果将这些形态进行组合,则可以发现对于1个位置和姿势可以采取多种形态。形态的组合如下表所示。
| 值 | 臂形态 | 肘形态 | 手腕形态 | 手腕形态2 |
|---|---|---|---|---|
| 0 | RIGHTY | ABOVE | FLIP | FLIP2 |
| 1 | LEFTY | ABOVE | FLIP | FLIP2 |
| 2 | RIGHTY | BELOW | FLIP | FLIP2 |
| 3 | LEFTY | BELOW | FLIP | FLIP2 |
| 4 | RIGHTY | ABOVE | NONFLIP | FLIP2 |
| 5 | LEFTY | ABOVE | NONFLIP | FLIP2 |
| 6 | RIGHTY | BELOW | NONFLIP | FLIP2 |
| 7 | LEFTY | BELOW | NONFLIP | FLIP2 |
| 256 | RIGHTY | ABOVE | FLIP | NONFLIP2 |
| 257 | LEFTY | ABOVE | FLIP | NONFLIP2 |
| 258 | RIGHTY | BELOW | FLIP | NONFLIP2 |
| 259 | LEFTY | BELOW | FLIP | NONFLIP2 |
| 260 | RIGHTY | ABOVE | NONFLIP | NONFLIP2 |
| 261 | LEFTY | ABOVE | NONFLIP | NONFLIP2 |
| 262 | RIGHTY | BELOW | NONFLIP | NONFLIP2 |
| 263 | LEFTY | BELOW | NONFLIP | NONFLIP2 |
臂形态
臂形态,由第1轴、第2轴、第3轴的值决定。
臂形态可以采取左手系列反手(LEFTY)、右手系列正手(RIGHTY)的2种形态。
(J1~J6表示各个轴。)
| 反手 | 正手 |
|---|---|
 |
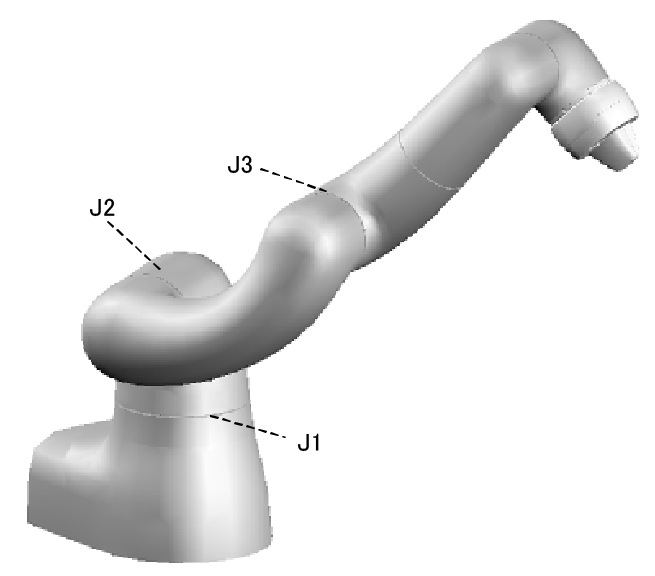 |
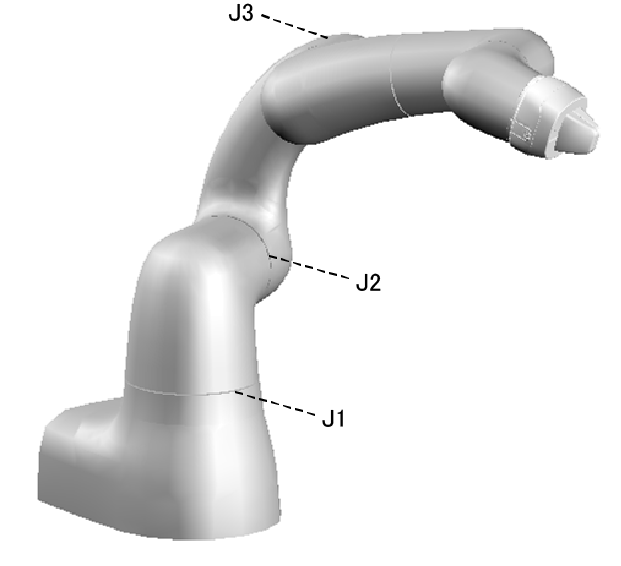
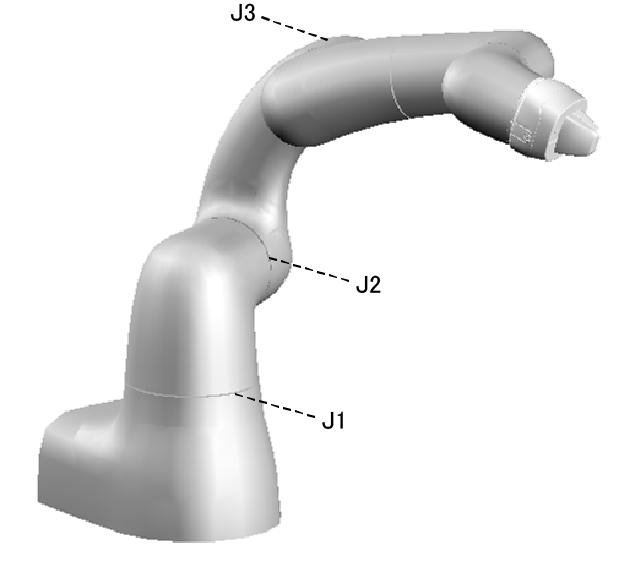
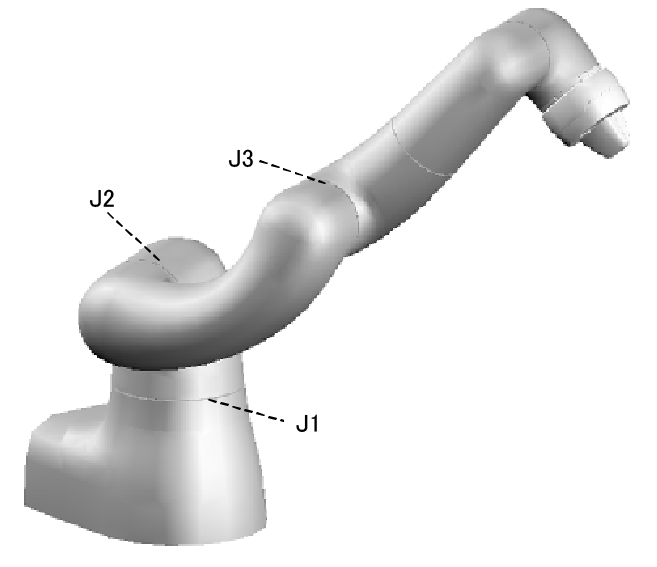
肘形态
肘形态由第2轴、第3轴的值决定。
肘的形态可以采取蜷起(ABOVE)和伸直(BELOW)的2种类型。
| 蜷起 | 伸直 |
|---|---|
 |
 |
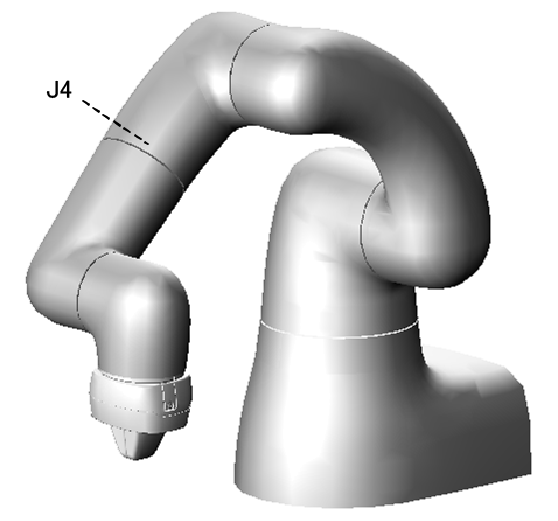
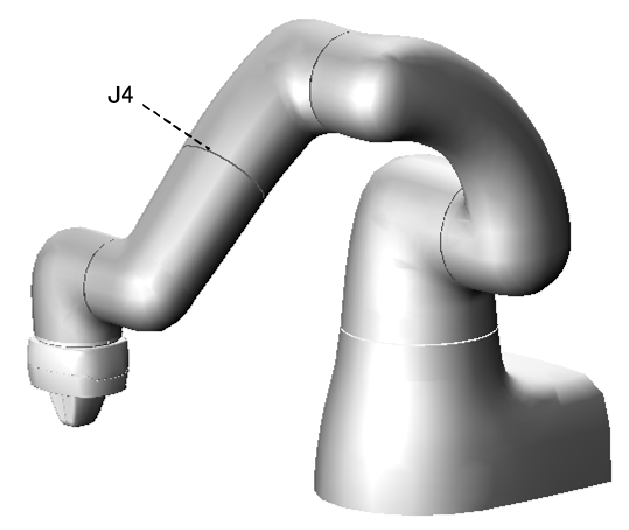
手腕形态
手腕形态由第4轴的值决定。手腕的形态可以采取翻动(FLIP)和不翻动(NONFLIP)2种类型。
(J1~J6表示各个轴。)
| 翻动 | 不翻动 |
|---|---|
 |
 |
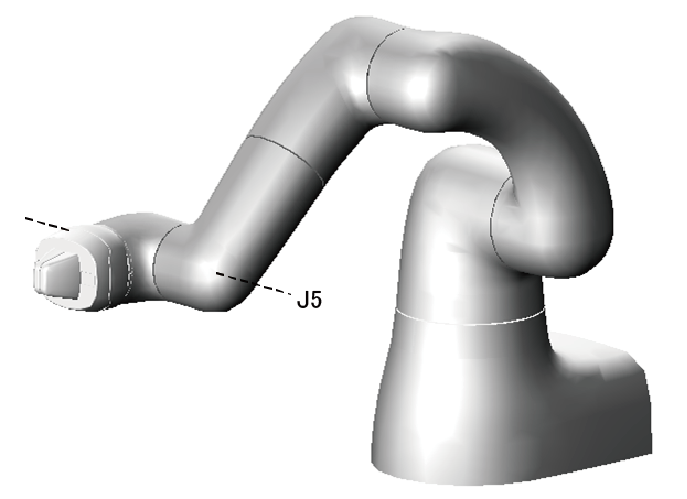
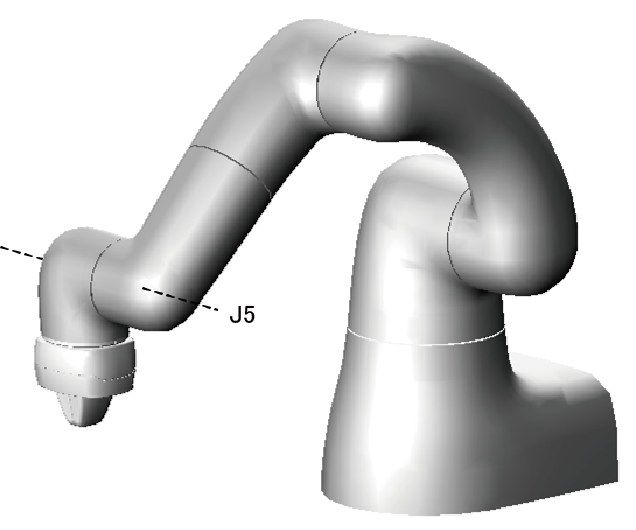
手腕形态2
手腕2的形态由第5轴的值决定。手腕2的形态可以采取翻动2(FLIP2)和不翻动2(NONFLIP2)2种类型。
| 翻动2 | 不翻动2 |
|---|---|
 |
 |
ID : 6995