
ID : 3495
Safe Torque Off (STO)
功能
关闭机器人本体的电机电源的功能。
相当于IEC60204-1的停止范畴0。
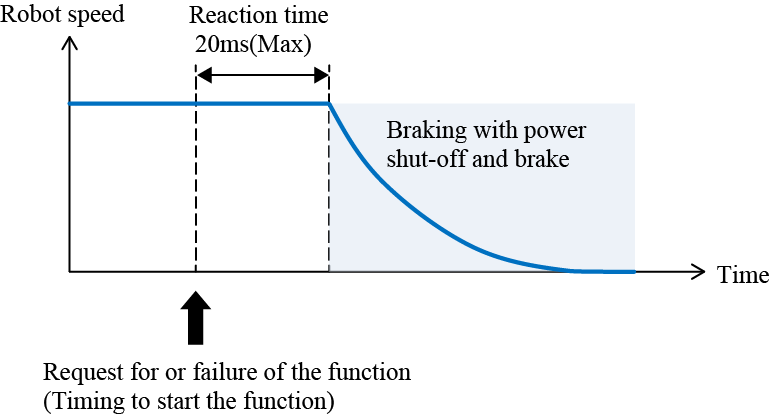
机器人开始电力阻断动作。机器人停止所用的时间与距离依存于系统的力学以及运动能量。
使用条件
| 输入信号 | 无 |
|---|---|
| 输出信号 | STO监视器输出 |
| 监视对象 | - |
| 监视范围设定 | 无 |
| Reaction time | 20ms(Max) |
| Process Safety Time (PST) | 150ms |
| 功能的开始时机 | 从其他功能启动时开始 |
ID : 3495