
ID : 7320
スロースタート(SS)機能
機能概要
ロボットが一定時間停止していた場合、その後ロボットが動作する時に低速で動作する機能です。
あらかじめ設定された時間内に動作するときは低速となり、設定時間経過後はユーザが指定した速度に戻って動作します。
この機能はVer.2.7.*から使用可能です。
リモートTP/バーチャルTPでは、現在のパラメータ設定状態は[ヘルプ] - [パラメータ確認] - [その他]タブにて確認出来ます。
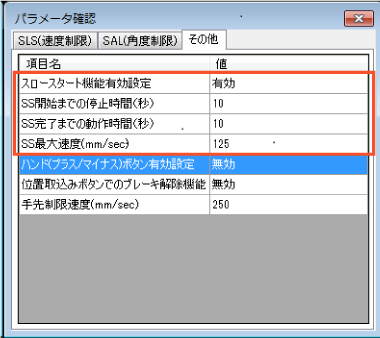
| 項目名 | 初期値 | 内容 |
|---|---|---|
スロースタート機能有効設定 |
有効 | 本機能の使用(有効)、不使用(無効)を設定します。 |
| SS開始までの停止時間(秒) | 10 | スロースタート機能有効時、設定された時間以上ロボットが停止している場合にロボットが低速で動作します。 ただし次の場合は設定時間に関係なくスロースタート機能が働きます。
1~3600(秒)の範囲で設定します。 |
SS完了までの動作時間(秒) |
10 | ロボットが低速で動作し始めてから設定された時間以上経過すると、ユーザにて指定した速度に戻って動作します。 1~3600(秒)の範囲で設定します。 |
SS最大速度(mm/sec) |
125 | スロースタート時の最大動作速度 50~250[mm/sec]の範囲で設定します。 |
設定方法
各パラメータはCOBOTTAパラメータツールにて変更できます。
状態表示LEDによる通知
通常ユーザプログラム実行中ロボット本体の状態表示LEDは白色の点灯になります。
スロースタート機能によりロボットが低速で動作しているとき 、状態表示LEDは白色の点滅になります。
スロースタート機能が働かない場合
パラメータの設定によらず、以下の場合はスロースタート機能が働きません。
- 手動操作による動作
- 変数移動による動作
- 起動時のCALSET実行時
- WINCAPSIIIでのシミュレーション機能
- マシンロック運転
使用上の注意事項
本機能を使用しても、人とロボットの衝突を回避する事は保証されません。ユーザプログラムを実行する際は、ロボットの近くに人がいない事を確認の上行って下さい。
各パラメータ値はお客様の設備環境に応じて設定して下さい。工場出荷時の設定値のまま使用した場合、お客様の環境によっては作業者とロボットとの衝突が発生する恐れがあります。
ID : 7320