
ID : 7007
ツール定義の使用例
Changetool 0 を指定すると、ツール定義が解除され、メカニカルインタフェース座標(TOOL0)になります。
TakeArmコマンドは、Changetool 0 を自動的に実行します。
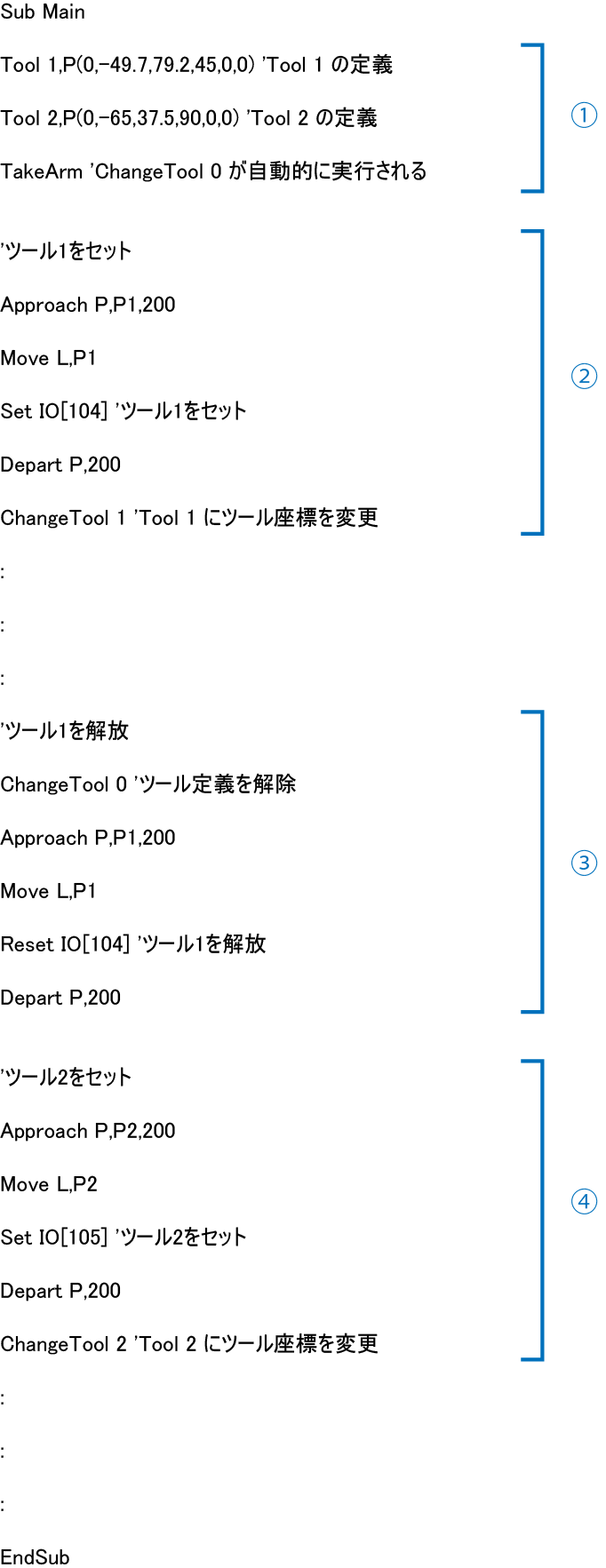
プログラム例
ツール定義を指定したあと、解除するプログラム例を示します。ツール1はP1に置いてあり、ツール2はP2に置いてあります。
|
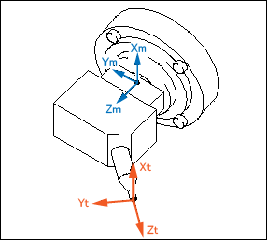
ツール1
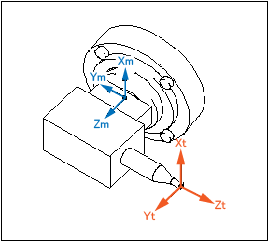
ツール2
プログラムの説明
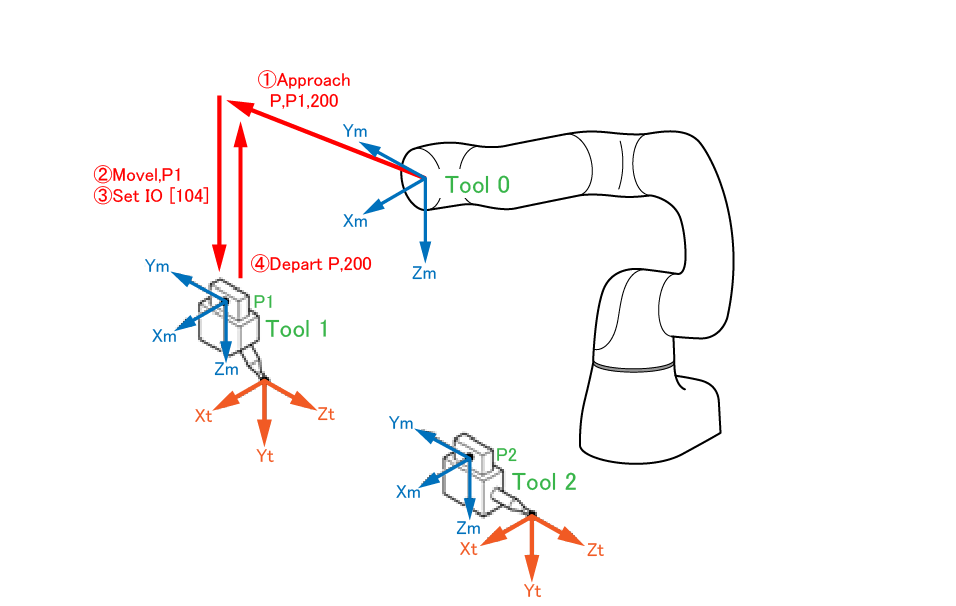
①定義、TakeArm
プログラム例ではまずツール定義としてツール1をTOOL1 で、ツール2をTOOL2 で定義します。
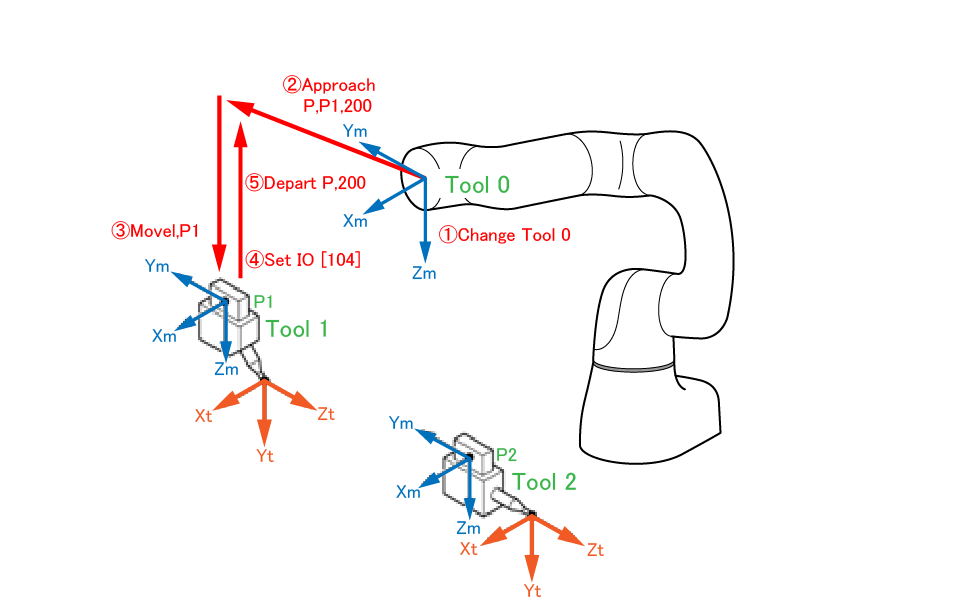
その後、TakeArmコマンドを実行することによって、自動的にTOOL0 が指定されるので、ロボットはまずフランジ面を基準とする動作により、P1(ツール1が置いてある)に移動します。
②ツール1をセット
Set IO[104]によりツール1をセットし、Depart P,200でP1から離れ、ChangeTool 1でツール座標をTOOL1 に変更します。
③ツール1を解放
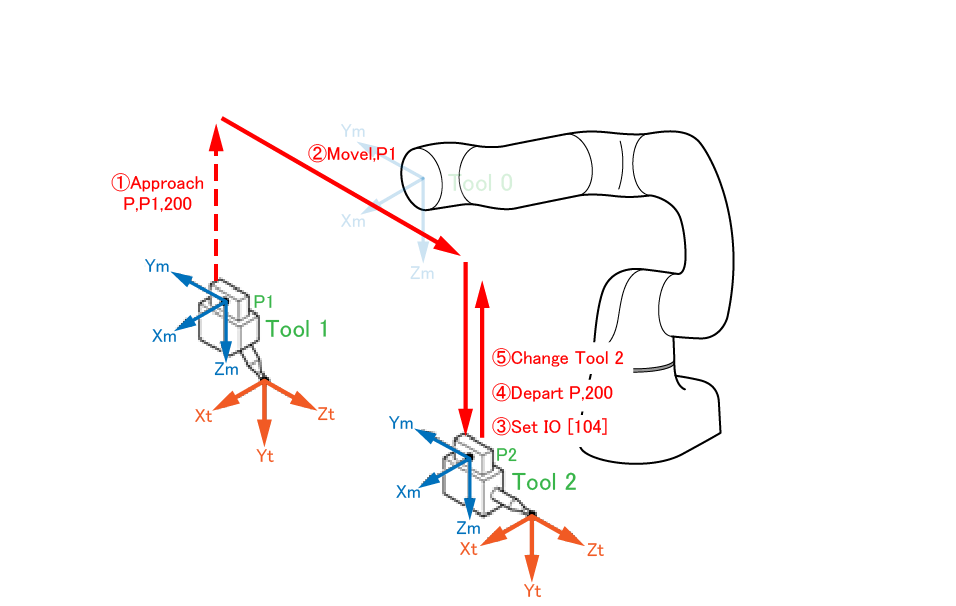
ツール1をツール2に交換するには、現在のツール1を解放しなければなりません。
ChangeTool 0で、メカニカルインタフェース座標に切り替えてから、P1に移動し、ツール1を解放してP1に置きます。
④ツール2をセット
メカニカルインタフェース座標のままP2へ移動し、ツール2をセットします。Depart P,200 でP2を離れてから、TOOL2 にツール座標を変更します。
ID : 7007