
ID : 18195
不可水平调整 机器人固定板
安装在机器人安装面和混凝土面之间的机器人固定板。
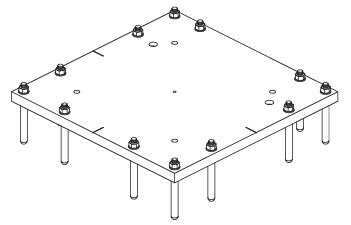
构件
- 基础盖板(数量 : 1)
质量
约220 kg
盖板设置孔
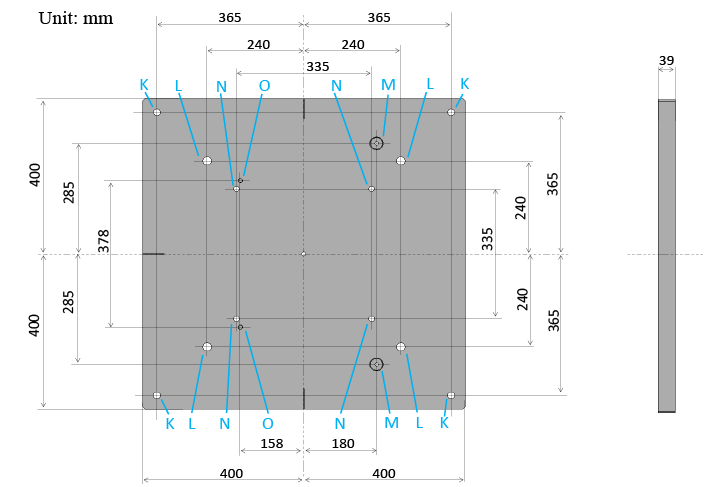
K : 化学锚栓用
L : 机器人固定螺栓用(VLA系列用)
M : 定位销钉用(VLA系列用)
N : 机器人固定螺栓用(VMB系列用)
O : 定位销钉用(VMB系列用)
安装方法
推荐使用工具、器具
- 化学锚栓(*1)
- 钻床(钻孔加工机床)
- 钻头(ø9, ø24孔用)
- 角磨机(金属磨削)
- 扭力扳手 带套筒/钻头
- 吊环螺栓 M24(个数 : 4)
- 金属用灰浆(*2)
*1 : 推荐品登载在下面。除以下步骤之外,化学锚栓还要根据购买的化学锚栓附带的使用说明书使用。
| 零部件名称 | 制造商 | 型式 | 孔的深度和直径 | 数量 |
|---|---|---|---|---|
| 化学胶囊 | HILTI | HVU M20x170 | ø24x170mm | 12 |
| 带螺纹锚杆 | HAS-E M20x170/48 | 12 |
*2 : 为防止因机器人动作时反复产生反作用力而造成盖板细微移动,推荐在混凝土面抹上金属用灰浆,将安装面抹平。
安装前的准备
1
在安装机器人的地面上做好2根垂直轴的标记。
2
在孔(A)的位置做上标记,以配置化学胶囊。
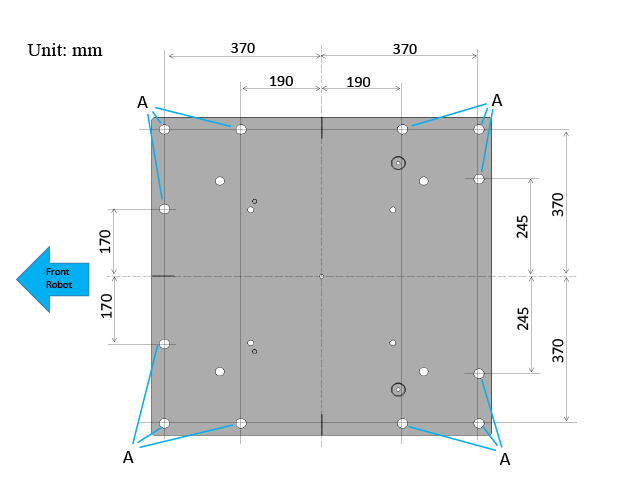
3
使用钻床和钻头ø9(深度170mm),事先在地面钻孔。
4
使用钻床和钻头ø24(深度170mm),在地面钻孔。
- 请务必与地面垂直钻孔。
- 请勿在钻孔中用水。请将孔保持干燥状态。
5
用吸尘器等清除所有的剩余物,使孔的内侧处于没有任何物品的干净状态。
6
将化学胶囊插入孔。
7
插入带螺纹锚杆,确认化学成分接触螺纹后,用螺钉固定。
8
化学胶囊发生作用,固定锚杆,等待锚杆自身与地面结合牢固。等待时间约5小时。
9
清扫放置机器人固定板的地上安装面。
安装步骤
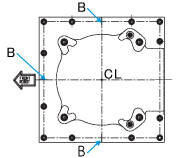
板上有3个切口(B)。切口B的轴交点定义为机器人1轴的位置(基准CL)。和板B的这个位置对应,有定位销孔。
1
将4个吊环插入基础盖板上的机器人固定螺栓孔(N)。
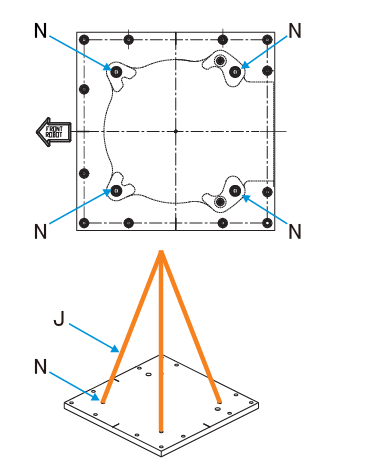
2
用4根吊装皮带(J)(最低长度1m)吊起基础盖板。
3
使用吊装装置抬起盖板(约220kg)。
4
将金属用灰浆抹开后(推荐行程),将盖板(E)配置在带螺纹锚杆(F)附近的地面。
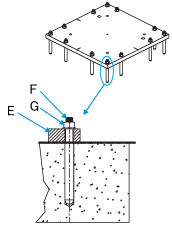
5
用扭矩150Nm拧紧锚杆的螺母部(G)。
6
拧松吊装作业中使用的吊环螺栓拆下。
7
切断螺丝突出的部分。
至此,机器人固定板的设置完成。
ID : 18195