
ID : 18189
现场网络子局端子
通过WICNAPSIII设定现场网络子局端子的参数。
1
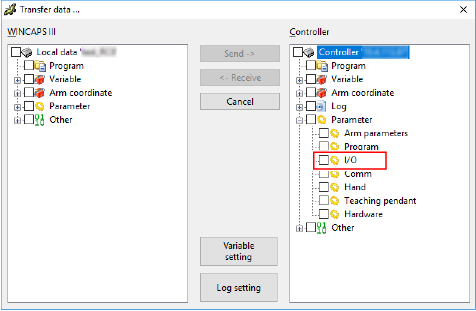
WINCAPSIII接收机器人控制器的“数字I/O”数据。已接收时,请进入下一步骤。
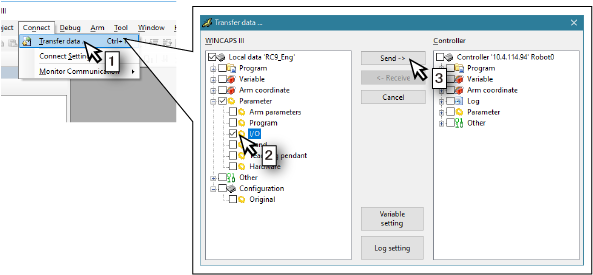
将机器人控制器的数据接收到WINCAPSIII的方法请参照“收发数据”。"数字I/O"数据在打开[发送接收数据]视窗中的控制器数据一览中的“参数”后显示 (参照下图)。
2
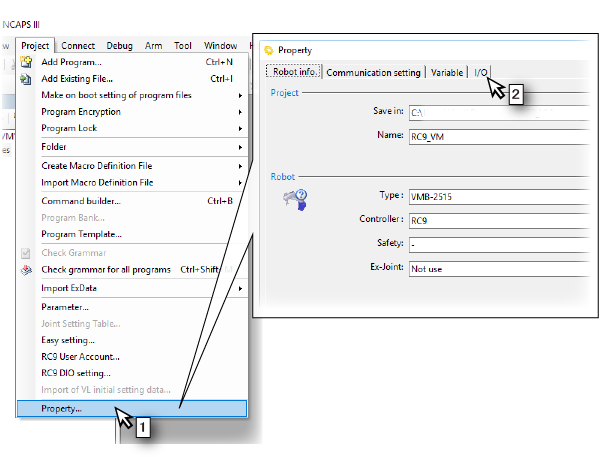
显示设定现场网络子局端子的参数的窗口。
- 从[项目]菜单中选择[属性]。
- 点击[项目属性]视窗的[I/O]标签。
3
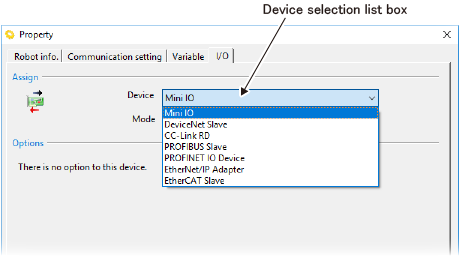
如果在现有的机器人控制器上追加了现场网络子局端子,需要变更设备。
请从[设备选择列表框]中选择追加的现场网络子局端子。
4
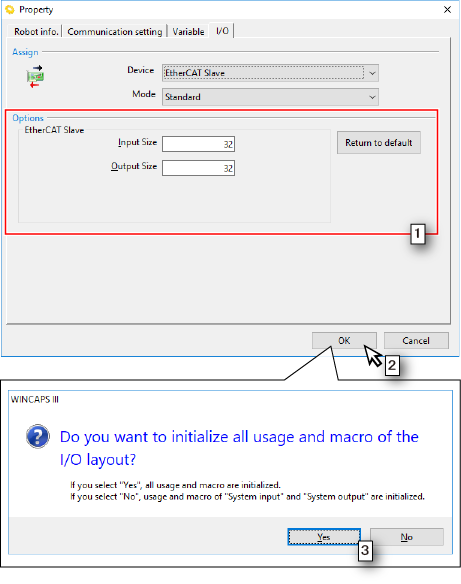
设定现场网络子局端子的参数。
下图为EtherCAT Slave(EtherCAT桥接端子)的示例。
- 将[选项]的内容变更为任意设定。
- 单击[OK]按钮。
- 显示选择是否初始化I/O配置的视窗后,单击“是”或“否”的其中一个。
使用EtherNet/IP子局端子时,需要注意主局的设定。详细内容请参照这里。
5
将设定的内容发送到机器人控制器。
- 从[通信]菜单中选择[发送接收数据]。
- 打开[WINCAPSIII]框的[参数],勾选[数字I/O]。
- 单击[发送]按钮。
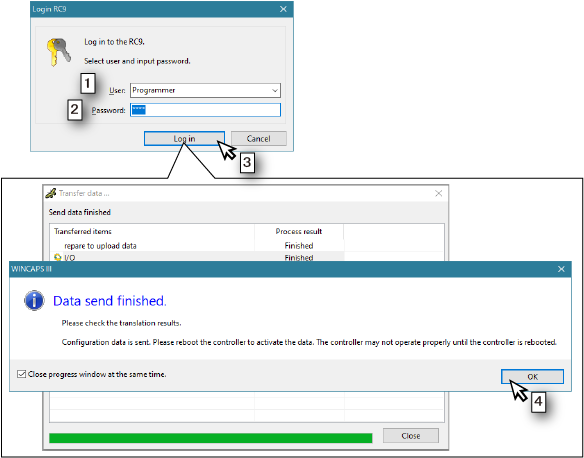
6
- 显示[登录RC9]视窗后,从机器人控制器中设定的用户内,选择用户等级为 "程序员" 以上的帐户。
- 输入密码。
- 单击[登录]按钮。
- 显示表示发送完成的视窗后,单击[OK]按钮。
- 重新接通机器人控制器的电源。
至此,机器人控制器的设定结束。使用配置器用文件(EDS文件、ESI文件等)时,请参照以下步骤。
7
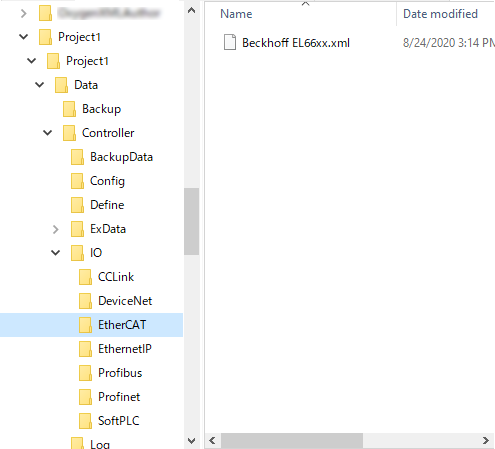
配置器用文件被保存在机器人控制器内。从机器人控制器接收“数字I/O”的数据时,会保存在WINCAPSIII的项目文件夹中。保存位置的文件夹路径如下所示。
将PROFINET RT设备端子追加到现有的机器人控制器上使用时,在执行STEP2~STEP6后,将变为可接收PROFINET RT设备端子用文件的状态。因此,请在执行STEP2~STEP6后,再次从机器人控制器接收“数字I/O”的数据。
| ...\"项目名" | ||||||
| \"项目名" | ||||||
| \Data | ||||||
| \Controller | ||||||
| \IO | ||||||
| \Profinet | ||||||
|
\GSDML-beckhoff-Conf#el6631-0010.xml (PROFINET RT设备端子用文件) |
||||||
| \EthernetIP | ||||||
|
\EL6652-0010_RC9.EDS (EtherNet/IP子局端子用文件) |
||||||
| \Profibus | ||||||
|
\EL6731-0.gsd (PROFIBUS子局端子用文件) |
||||||
| \DeviceNet | ||||||
|
\EL6752-0010S.eds (DeviceNet子局端子用文件) |
||||||
| \EtherCAT | ||||||
|
\Beckhoff EL66xx.xml (EtherCAT桥接端子用文件) |
||||||
例如,项目名称为“Project1”的项目的EtherCAT桥接端子用文件的保存位置如下图所示。
ID : 18189
- 本页相关信息
- 使用EtherNet/IP子局端子时的注意事项