
ID : 10724
机器人的各连接器
概要
VLA系列机器人在下图A、B部分有连接器。
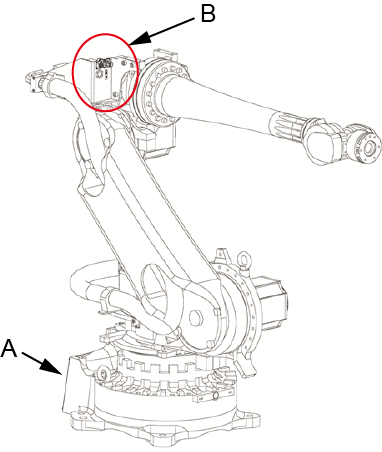
- A : 机器人底座(配电盘)连接
- B : 3轴(工具用)连接
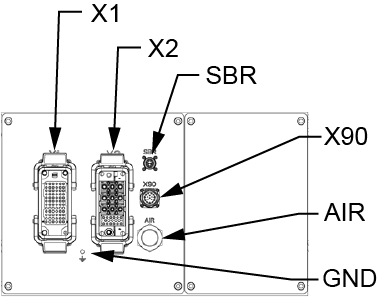
机器人底座(配电盘)的连接
下图表示可通过机器人底座(配电盘)连接。
| 连接器编号 | 内容 |
|---|---|
| X1 | 和控制器的编码器用连接器连接。 机器人通过编码器和机内配线连接到前臂部的X70连接器。 使用时用附属(必须的选件)的本体间电缆配线。 |
| X2 | 和控制器的动力用连接器连接。 机器人连接到电机及制动器。 使用时用附属(必须的选件)的本体间电缆配线。 |
| X90 | Hand用信号连接器。 使用多通电缆与控制器进行信号(通常为I/O)通信。 通过机内配线连接到前臂部的X200连接器。 使用时,用选件多通电缆或附属的X90用连接器进行配线。 |
| SBR | 制动器解除单元用连接器。 |
| AIR | 气动配管接头。
|
| GND | 保护接地导体用螺丝(M6) 使用附带的接地线连接到控制器的接地端子进行接地。 |
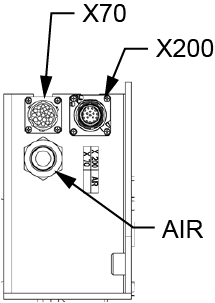
第3轴的连接(工具用)
| 连接器编号 | 内容 |
|---|---|
| X70 | Hand I/O连接器。 通过机内配线连接到底座部的X1连接器。 使用时,通过附属的X70用连接器进行配线。 |
| X200 | Hand用信号连接器。 通过机内配线连接到底座部的X90连接器。 使用时,通过附属的X200用连接器进行配线。 |
| AIR | 气动配管接头。
|
附带连接器
X70用连接器
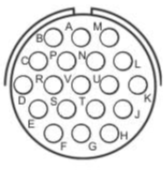
- J, T, U, V未使用。
- 引脚排列请参照“连接器的引脚排列”
| 连接器组件 | 制造商型号 | 制造商 | |
|---|---|---|---|
 |
连接器 | UTO61619PH | SOURIAU生产 |
 |
电缆地线 | UTO16JCS(cable clamping range 9.5 – 14.5 mm) | |
 |
连接器引脚 | RM16M-SCD28 | |
X200用连接器

- 15、16未使用。
- 引脚排列请参照“连接器的引脚排列”
| 连接器组件 | 制造商型号 | 制造商 | |
|---|---|---|---|
|
连接器 | ASA035N00590038000(cable clamping range 14.0 – 17.0 mm) | TE生产 |
 |
连接器引脚 | 60-0004-011-000 | |

X90用连接器
- 15、16未使用。
- 引脚排列请参照“连接器的引脚排列”
| 连接器组件 | 制造商型号 | 制造商 | |
|---|---|---|---|
 |
连接器 | AUA034N00480150000(cable clamping range 7.5 – 12.0 mm) | TE生产 |
 |
连接器引脚 | 61-0006-011-000 | |
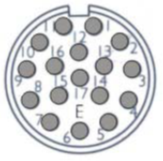
连接器的引脚排列
X1, X70用连接器
| X1 | X70 | 信号名称 |
|---|---|---|
| 36 | A |
+24 V |
| 12 | B |
0 V |
| - | C | GND |
| 72 | K | Output 1 |
| 71 | L | Output 2 |
| 70 | M | Output 3 |
| 69 | N | Output 4 |
| 46 | E | Output 5 |
| 47 | F | Output 6 |
| 57 | P | Input 1 |
| 58 | R | Input 2 |
| 59 | S | Input 3 |
| 60 | G | Input 4 |
| 9 | D | Input 5 |
| 21 | H | Input 6 |
| - | J | Open |
| - | T | Open |
| - | U | Open |
| - | V | Open |
X90, X200用连接器
| X90 | X200 | I/O | Fieldbus type | ||
|---|---|---|---|---|---|
| PROFIBUS | DEVICENET | PROFINET | |||
1 |
1 |
User |
Not Used | 0 Vdc | Not Used |
| 2 | 2 | User | Not Used | Not Used | Not Used |
| 3 | 3 | User | Not Used | 24 Vdc | Not Used |
| 4 | 4 | User | Not Used | Not Used | Not Used |
| 5 | 5 | User | GND | GND | GND |
| 6 | 6 | User | PROFIBUS B | Not Used | Not Used |
| 7 | 7 | User | Not Used | Not Used | TX- |
| 8 | 8 | User | Not Used | Not Used | TX+ |
| 9 | 9 | User | Not Used | Not Used | RX- |
| 10 | 10 | User | Not Used | Not Used | RX+ |
| 11 | 11 | User | PROFIBUS A | Not Used | Not Used |
| 12 | 12 | User | Not Used | Not Used | Not Used |
| 13 | 13 | User | Not Used | CAN_H | Not Used |
| 14 | 14 | User | Not Used | CAN_L | Not Used |
| 15 | 15 | Open |
Open | Open | Open |
| 16 | 16 | Open | Open | Open | Open |
| 17 | 17 | User | Not Used | Not Used | Not Used |
ID : 10724