
ID : 10641
连接本体之间电缆
通过本体之间电缆连接机器人控制器和机器人。
本体之间电缆有动力用和编码器用2种。
- 动力用 300mm以上
- 编码器用 230mm以上
本体间电缆的弯曲R(内径)请确保以下所示的宽度。过度弯曲会导致断线。
机器人侧的连接
已连接机器人控制器侧的连接器时,确认机器人控制器的电源切断后再进行作业。
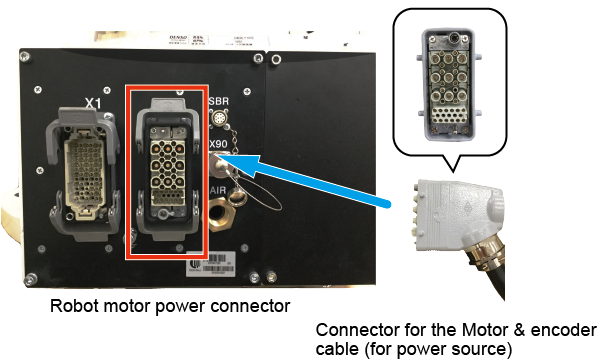
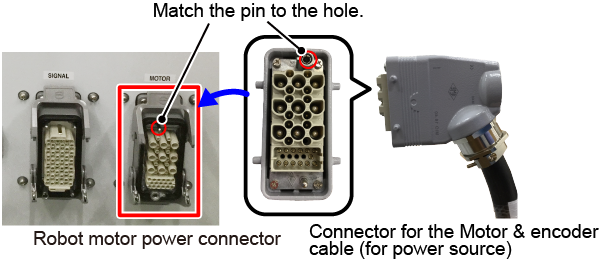
连接本体之间电缆(动作用)
1
确保本体之间电缆(动作用)的连接器和机器人动力连接器的左右朝向一致。
反向则无法插入。
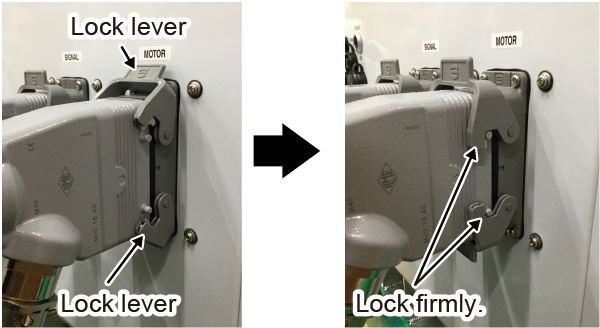
2
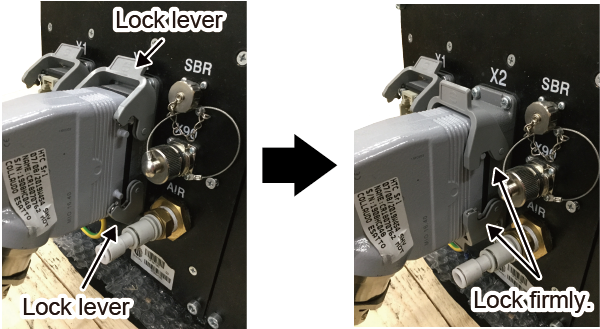
将本体之间电缆(动作用)的连接器垂直插入机器人动力连接器,并操作2个锁定杆锁定。
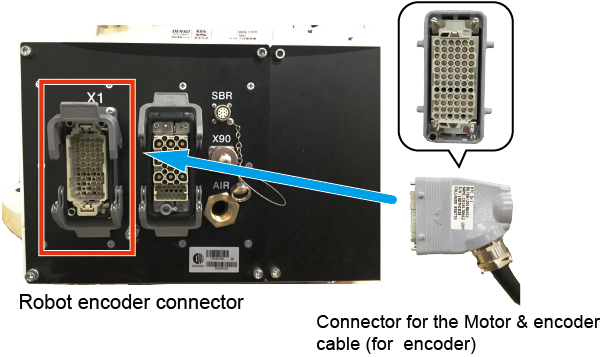
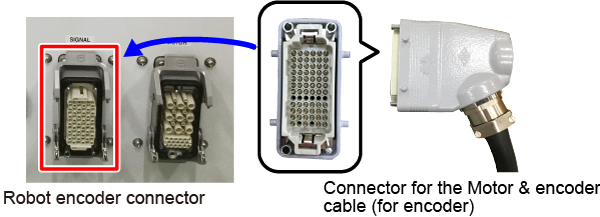
连接本体之间电缆(编码器用)
1
确保本体之间电缆(编码器用)的连接器和机器人编码器连接器的左右朝向一致。
反向则无法插入。
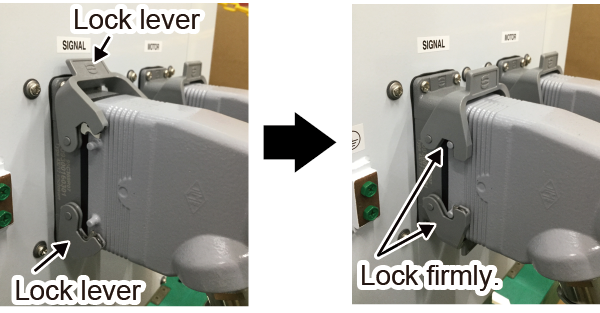
2
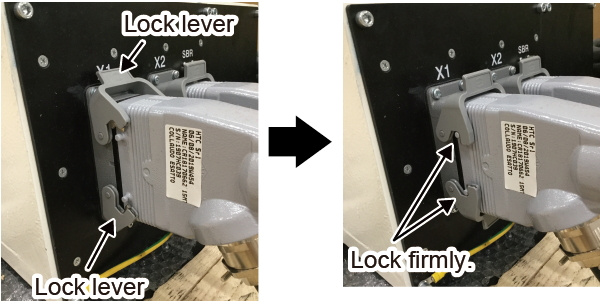
将本体之间电缆(编码器用)的连接器垂直插入机器人编码器连接器,并操作2个锁定杆锁定。
机器人控制器侧的连接
确认机器人控制器的电源切断后再进行作业。
连接本体之间电缆(动作用)
1
确保本体之间电缆(动作用)的连接器和机器人动力连接器的上下朝向一致。
反向则无法插入。
2
将本体之间电缆(动作用)的连接器垂直插入机器人动力连接器,并操作2个锁定杆锁定。
连接本体之间电缆(编码器用)
1
确保本体之间电缆(编码器用)的连接器和机器人编码器连接器的上下朝向一致。
反向则无法插入。
2
将本体之间电缆(编码器用)的连接器垂直插入机器人编码器连接器,并操作2个锁定杆锁定。
ID : 10641