
ID : 10207
Safety I/O的配线
这里就Safety I/O的内容,分以下项目进行说明。
配线表
Safety/O电缆的端子编号和线色的内容如下所示。
|
连接器的端子编号 (从连接器连接面看到的图) |
|
|---|
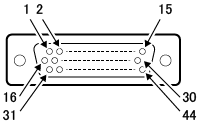
| 端子编号 | 名称 | 配线对 | 线色 |
|---|---|---|---|
| 1 | 外部紧急停止输入1b-1 | 对 | 黑 |
| 31 | 外部紧急停止输入1b-2 | 粉 | |
| 2 | 外部紧急停止输入2b-1 | 对 | 棕 |
| 32 | 外部紧急停止输入2b-2 | 粉 | |
| 3 | 防护停止输入1-1 | 对 | 红 |
| 33 | 防护停止输入 1-2 | 粉 | |
| 4 | 防护停止输入 2-1 | 对 | 橙 |
| 34 | 防护停止输入2-2 | 粉 | |
| 5 | 自动允许输入 1-1 | 对 | 黄 |
| 35 | 自动允许输入 1-2 | 粉 | |
| 6 | 自动允许输入 2-1 | 对 | 绿 |
| 36 | 自动允许输入 2-2 | 粉 | |
| 7 | - | 对 | 蓝 |
| 37 | - | 粉 | |
| 8 | - | 对 | 黑 |
| 38 | - | 灰 | |
| 9 | - | 对 | 棕 |
| 39 | - | 灰 | |
| 10 | 允许开关输出1-1 | 对 | 红 |
| 40 | 允许开关输出1-2 | 灰 | |
| 11 | 允许开关输出2-1 | 对 | 橙 |
| 41 | 允许开关输出2-2 | 灰 | |
| 12 | - | 对 | 黄 |
| 42 | - | 灰 | |
| 13 | 紧急停止输出 1b-1 | 对 | 绿 |
| 43 | 紧急停止输出 1b-2 | 灰 | |
| 14 | 紧急停止输出 2b-1 | 对 | 蓝 |
| 44 | 紧急停止输出 2b-2 | 灰 | |
| 15 | - | 对 | 紫 |
| 30 | - | 灰 | |
| 16 | STO监视器输出1+ | 对 | 黑 |
| 17 | STO监视器输出1- | 白 | |
| 18 | STO监视器输出2+ | 对 | 棕 |
| 19 | STO监视器输出2- | 白 | |
| 20 | STO输出1+ | 对 | 红 |
| 21 | STO输出1- | 白 | |
| 22 | STO输出2+ | 对 | 橙 |
| 23 | STO输出2- | 白 | |
| 24 | - | 对 | 黄 |
| 25 | - | 白 |
信号的种类
Safety I/O的信号有以下类型。
外部紧急停止输入
使机器人停止的信号。
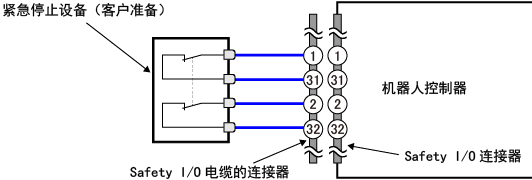
| 端子编号 | 内容 |
|---|---|
| 1和31(系统1) |
|
| 2和32(系统2) |
防护停止输入
使机器人暂时停止的信号。
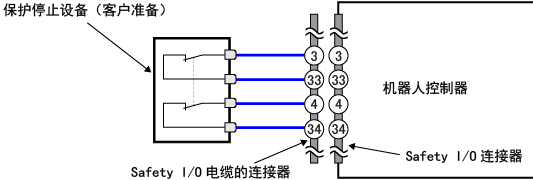
| 端子编号 | 内容 |
|---|---|
| 3和33(系统1) |
|
| 4和34(系统2) |
自动允许输入
将机器人控制器设为自动模式的信号。
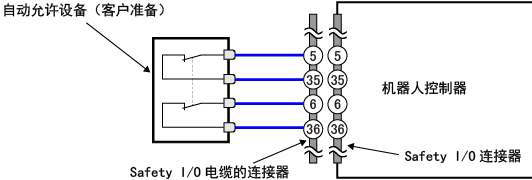
| 端子编号 | 内容 |
|---|---|
| 5和35(系统1) |
|
| 6和36(系统2) |
STO监视器输出、STO输出
需要通过外部机器知晓STO的状态时使用。
紧急停止输出
需要通过外部机器知晓紧急停止输入的状态时使用。
允许开关输出
需要通过外部机器知晓允许开关的状态时使用。
ID : 10207