
ID : 18199
水平調整不可 ロボット固定用プレート
ロボット取付け面とコンクリート面の間に設置するロボット固定用プレートです。
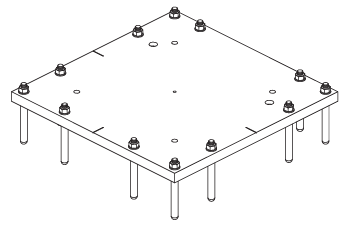
構成品
- ベースプレート (枚数 : 1)
質量
約220 kg
プレート設置穴
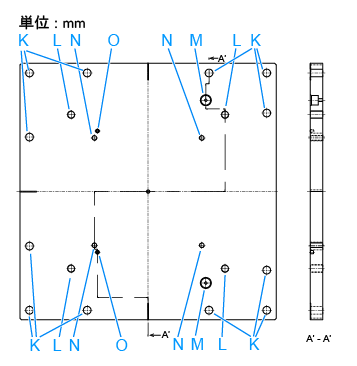
K: ケミカルアンカ用
L: ロボット固定ボルト用 (VLAシリーズ用)
M: 位置決めピン用 (VLAシリーズ用)
N: ロボット固定ボルト用 (VMBシリーズ用)
O: 位置決めピン用 (VMBシリーズ用)
設置方法
推奨使用工具・器具
- ケミカルアンカ (*1)
- ボール盤 (穴あけ加工機械)
- ドリルビット (ø9, ø24の穴用)
- アングルグラインダ (金属研削)
- トルクレンチ ソケット・ビット付き
- アイボルト M24 (個数 : 4)
- 金属用モルタル (*2)
*1 : 推奨品を下記に掲載します。ケミカルアンカの取扱いは下記手順に加え、ご購入のケミカルアンカに付属の取扱説明書に従って実施してください。
| 部品名 | メーカ | 型式 | 穴の深さと直径 | 数量 |
|---|---|---|---|---|
| ケミカルカプセル | HILTI | HVU M20x170 | ø24x170mm | 12 |
| ねじ付きアンカーロッド | HAS-E M20x170/48 | 12 |
*2 : ロボット動作時に繰り返し生じる反力によって生じるプレートの微小な動きを防ぐために、コンクリート面に金属用モルタルをひいて設置面を水平にすることを推奨します。
設置前の準備
1
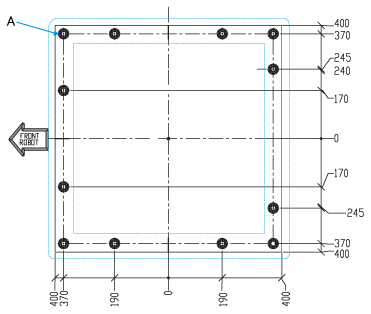
ロボットを設置する床に、2本の垂直な軸の印を付けます。
2
ケミカルカプセルを配置するために、穴(A)の位置に印を付けます。
3
ボール盤とドリルビット ø9(深さ170mm)を使用して、床面に事前の穴あけ加工をします。
4
ボール盤とドリルビット ø24(深さ 170mm)を使用して、床面に穴あけします。
- 必ず床に対して垂直に穴あけしてください。
- 穴あけに水を使用しないでください。穴は乾燥している状態にしてください。
5
残っているものすべてを掃除機などで取り除き、穴の内側は何もないきれいな状態にします。
6
穴にケミカルカプセルを挿入します。
7
ねじ付アンカーロッドを挿入したあと、回転および打撃でケミカルカプセルを攪拌し、化学成分がねじに接触していることを確認します。
8
ケミカルカプセルが作用してロッドを固定し、ロッド自体が床としっかり結合されるのを待ちます。待ち時間は、約5時間です
9
ロボット固定用プレートを置く床の設置面を清掃します。
設置手順
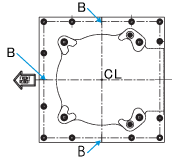
プレートには、ノッチ Bが3個あります。Bノッチの軸の交点は、ロボット1軸の位置(基準 CL)と定義します。Bプレートのこの位置に対応して、位置決めピンの穴があります。
1
ベースプレートにある穴(N)にアイボルト4本を挿入します。
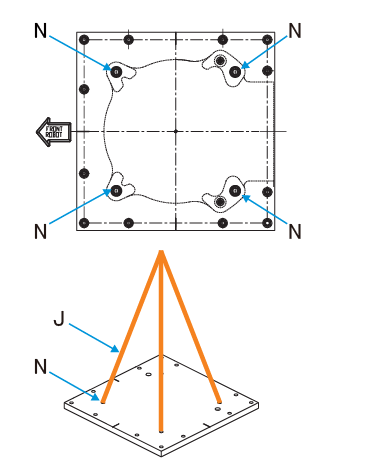
2
吊り上げベルト(J) (最低長さ1m) 4本でベースプレートを吊るします。
3
吊り上げ装置を使用して、プレート(約220kg)を持ち上げます。
4
金属用モルタルを広げた後(推奨行程)、プレート(E)を、プレートの穴にアンカーロッド(F)が入るように設置します。
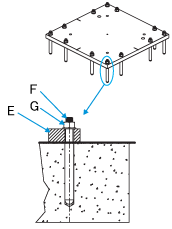
5
アンカーロッドのナット部(G)をトルク150Nmで締め付けます。
6
吊り上げ作業で使用したアイボルトを緩めて、取り外します
7
ねじの飛び出ている部分をカットします。
以上で、ロボット固定用プレートの設置は完了です。
ID : 18199