
ID : 10968
付加軸の変数指定移動方法
指定した変数に移動する手順を説明します。
ロボット軸や付加軸同士を同時に動かす場合
1
「付加軸の位置取込方法」を参照し、使用するアームグループを選択します。
以下の例では、[Group 1]を選択しています。
2
ロボットおよび、付加軸を目標の位置へ移動します。
3
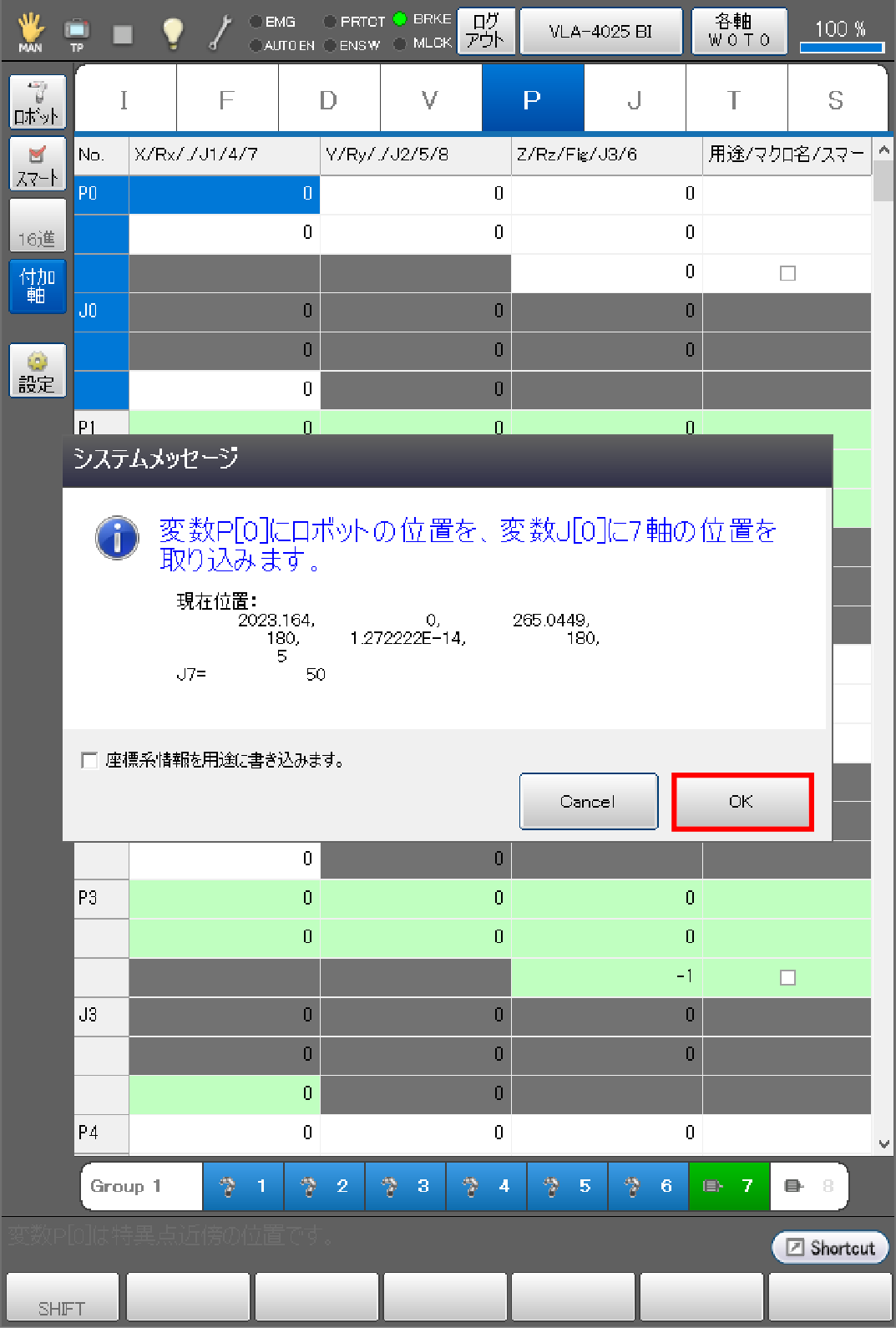
[F6 位置取込]を押し、変数に位置を取込みます。
4
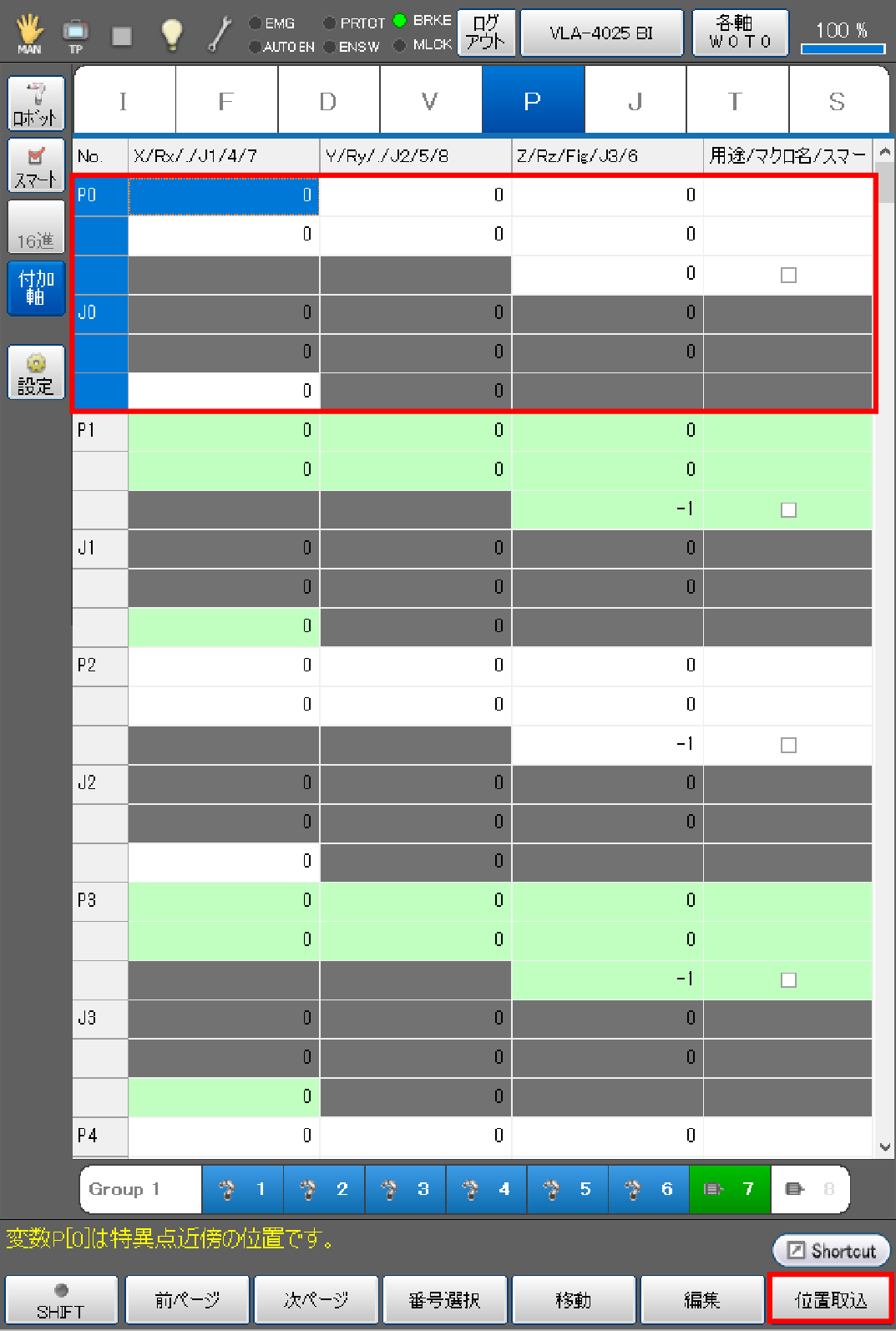
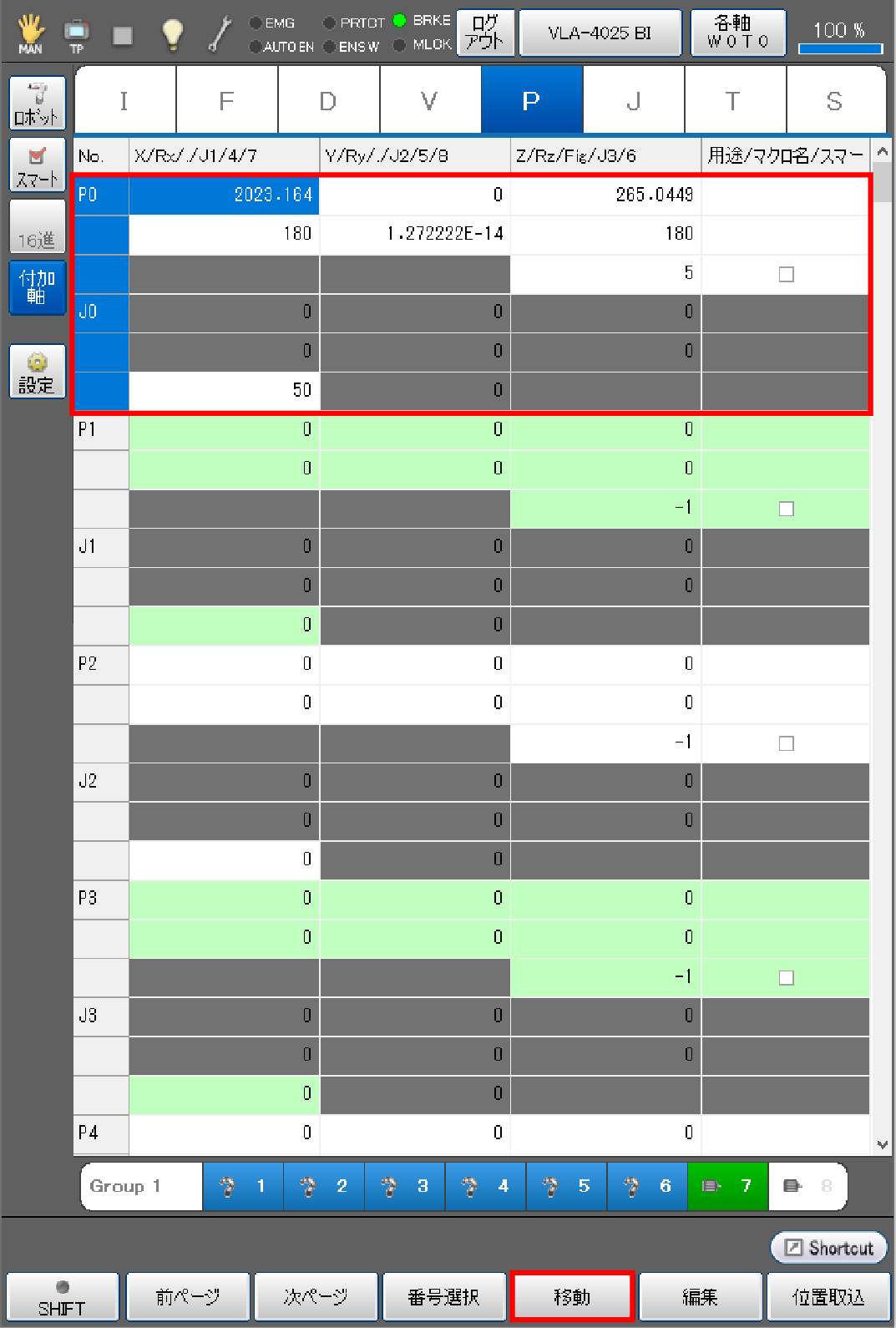
移動したい変数を選択し、[F4 移動]を押します。
以下の例では、"P0、J0"を選択しています。
5
「変数指定移動」画面が表示されますので、PTP動作または、CP動作(直線)を選択し、イネーブルスイッチと[FWD]ボタンを押します。
以下の例では、PTP動作を選択しています。
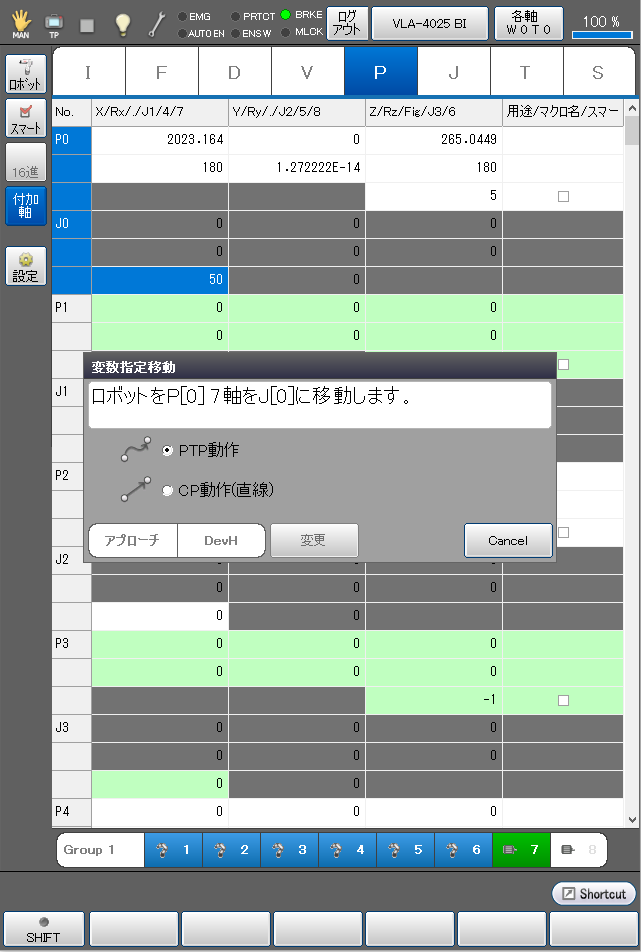
プログレスバーが表示され、移動が開始します。
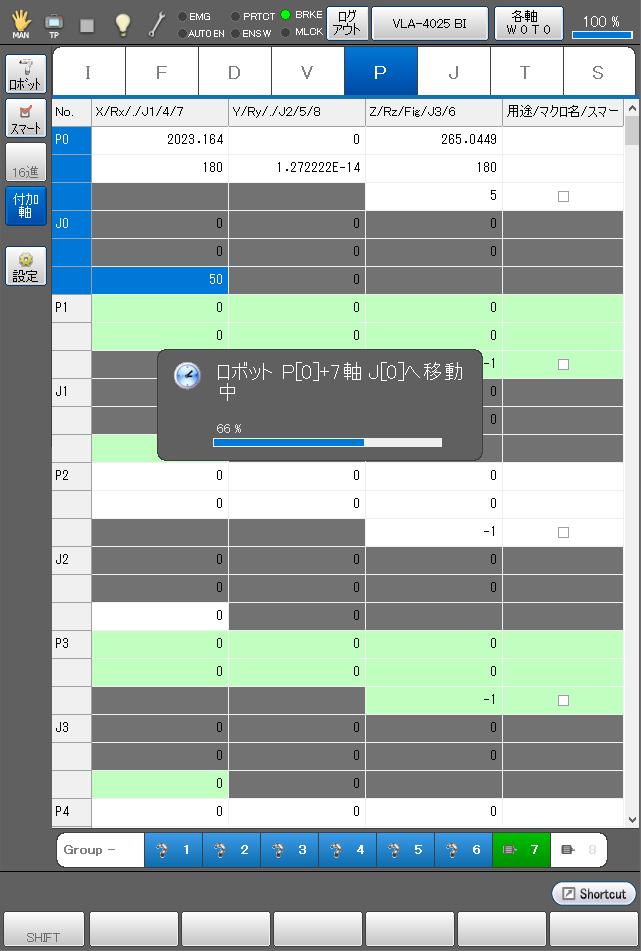
- 移動中はイネーブルスイッチ及び、[FWD]ボタンは押し続けてください。移動中にイネーブルスイッチまたは、[FWD]ボタンを離すと停止します。
-
付加軸のみ、1軸ごとの変数指定移動も可能です。
変数指定移動する付加軸を選択し、[F4 移動]を押すと、指定した付加軸のみ変数指定移動ができます。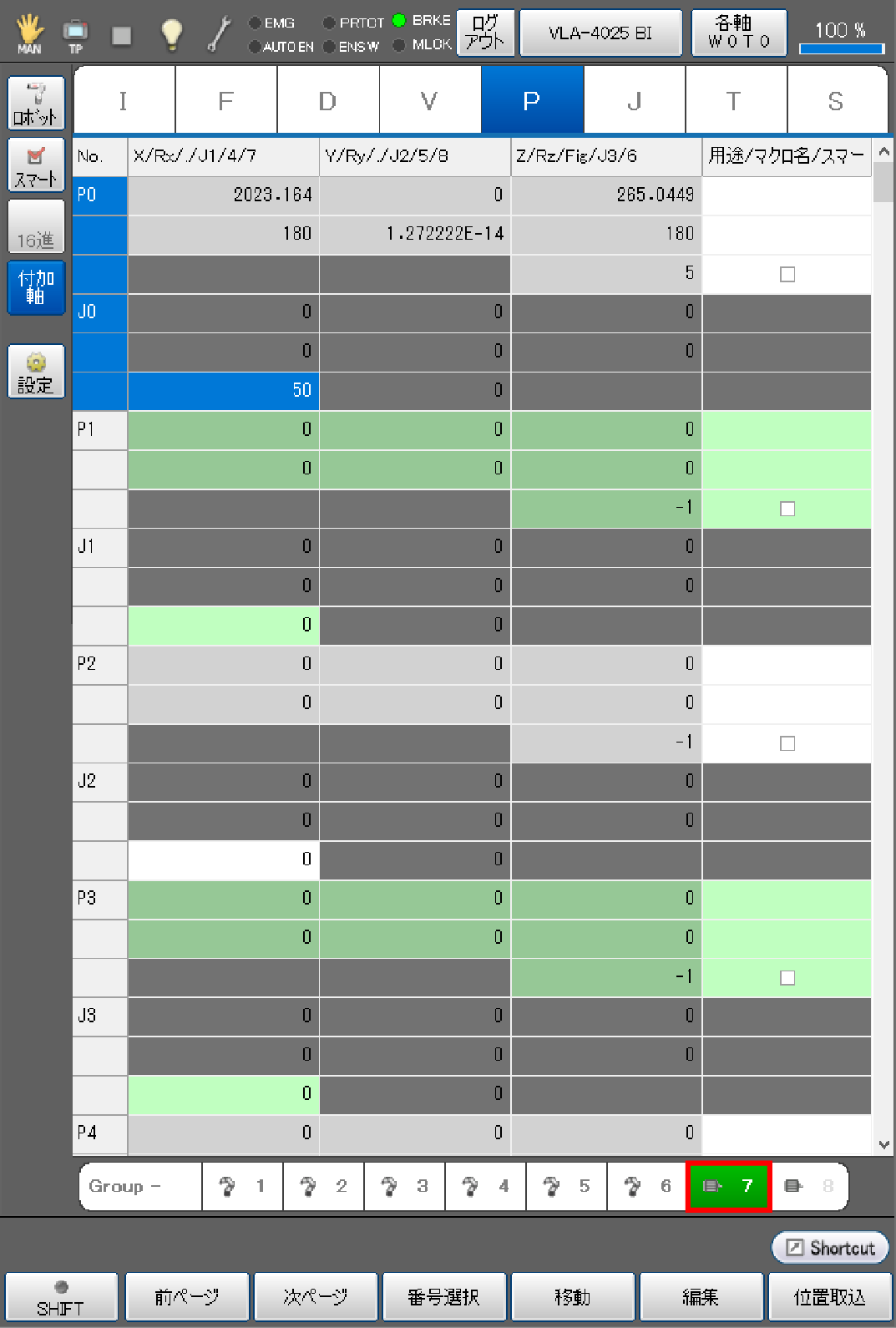
ID : 10968