
ID : 10935
トルクチェック機能
トルクチェック機能とは、ロボットの動作に必要なトルクと実際のトルクの値が大きく離れている場合にエラーを発生させる機能です。負荷設定の値が誤っている場合やロボットを衝突させた場合などでエラーが発生します。
工場出荷時から常にトルクチェック機能は有効になっています。この機能を無効にすることはできません。負荷設定の値を確認してもエラーが頻発する場合は"正確な負荷情報を設定してもエラーが頻発する場合"を参照してください。
この機能はVer.1.1.*から使用可能です。
トルクチェック機能に関するエラーが頻発する場合
以下のエラーコードが発生する場合は、ロボットに想定以上の負荷がかかっている可能性があります。負荷設定の値を確認してください。
| エラーコード | メッセージ |
|---|---|
| 8F404591~8F404596 | 1~6軸: トルク偏差警告です。 |
| 834045A1~834045A6 | 1~6軸: トルク偏差過大です。 |
| 8F4045B1~8F4045B6 | 1~6軸: 瞬時トルク偏差警告です。 |
| 834045C1~834045C6 | 1~6軸: 瞬時トルク偏差過大です。 |
エラー発生時に確認する設定
負荷設定 (先端負荷質量、先端負荷重心位置、負荷重心イナーシャ) を実際の負荷の正しい値となっているか確認し、正確に入力してください。
正しい負荷情報が分からない場合は、負荷推定機能を使用して負荷情報を設定してください。
ワークなどの持ち替え時にエラーが発生する場合
ワークが重量物の場合は、把持している状態とそうでない状態でロボットに掛かる負荷が大きく異なるため、トルクチェック機能が働く可能性があります。
エラーの発生を回避するには、ワークを持ち替えた後の動作コマンドより前に、Payloadコマンドにて負荷設定を適切に変更してください。
下記の用例を参照してください。
用例
Sub Sample_TorqueCheck
Dim jStart As Joint
Dim j1 As Joint
Dim j2 As Joint
jStart = J( 0, 60, 90, 0, 30, 0 )
j1 = J( 0, 30, 90, 0, 60, 0 )
j2 = J( 0, 30, 90, 0, 90, 0 )
TakeArm Keep = 1
Move P, jStart ' ワークの把持位置へ移動
' ワークを把持するプログラム
PayLoad 25000, V( 0, 100, 150 ) ' ハンドとワークの合計重量で設定
Move P, j1 ' ワークを把持した状態で移動
:
:
:
' ワークをリリースするプログラム
PayLoad 10000, V( 0, 100, 150 ) ' ハンドのみの重量で設定
Move P, j2 ' ワークを把持していない状態で移動
:
:
:
End Sub正確な負荷情報を設定してもエラーが頻発する場合
動作によっては想定以上の負荷がロボットにかかることがあり、正確な負荷情報が設定されていてもエラーが発生する場合があります。
以下の対処をすることで、エラーの発生を低減、もしくはエラーレベルを下げることができます。
1. ロボット動作の変更
サイクルタイムなどに余裕がある場合は、エラーが発生する動作の動作経路の変更、または速度、加速度を減少させることで、エラーの発生を軽減することが可能です。
2. エラーレベルを0へ変更する
動作の変更ができない場合は、エラーレベルを初期値のレベル3からレベル0へ変更することで、エラーによる動作停止を防ぎます。
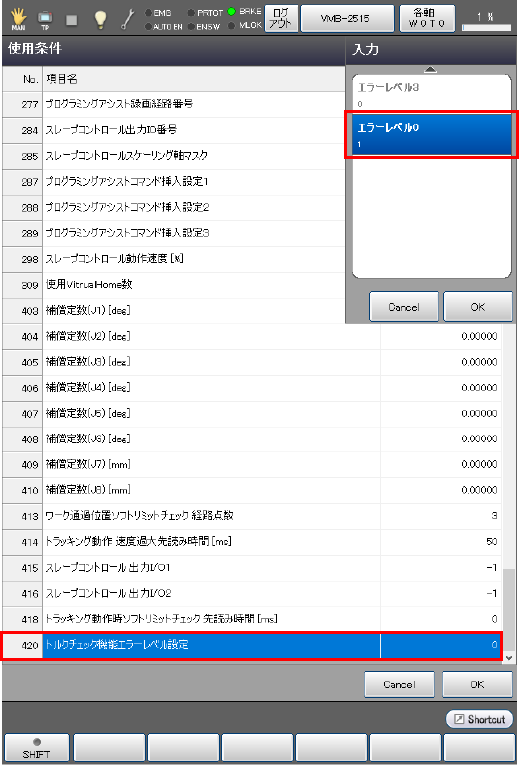
エラーレベルの変更方法
操作経路:[F2 アーム] - [F6 補助機能] - [F1 使用条件]
使用条件の[420 : トルクチェック機能エラーレベル設定]を"0:エラーレベル3"から"1:エラーレベル0"に変更して[OK]ボタンを押してください。
ID : 10935